Masterarbeit Robert Warncke
Titel der Arbeit:
Generierung vollsphärischer Panoramabilder auf Basis von Laserscanner- und Bilddaten auf einem Mobile-Mapping-Fahrzeug
Betreuer:
Dipl.-Ing. Frank Liebold, Dipl.-Ing. Steffen Scheller (Lehmann+Partner GmbH)
Beschreibung:
Um eine intakte Straßeninfrastruktur zu gewährleisten und um einen Überblick über den Zustand der Straßen zu behalten, müssen neue, schnellere Methoden zur Erfassung, Aufbereitung und Auswertung des Straßenbelags und der gesamten Straßenumgebung entwickelt werden.
Firma LEHMANN + PARTNER GmbH besitzt Mobile Mapping Fahrzeuge mit diversen Sensoren, unter anderem Laserscanner und Kameras, um den Straßenbereich aufzunehmen.
Die durch das im Rahmen der Masterarbeit entwickelte Programm erzeugten Panoramabilder haben eine Breite von 3600 Pixeln und eine Höhe von 1800 Pixeln mit einer Auflösung von 0,1 Grad. Es wird die gesamte Sphäre um das Projektionszentrum abgebildet. Somit ist das Panoramabild eine sphärische Projektion.
Für die Integration von Laserscanner-Punktwolken und Bilddaten in einem gemeinsamen Panoramabild sind verschiedene Algorithmen nötig.
Zunächst wird anhand der relativen Lage der einzelnen Punkte der Punktwolke zum Projektionszentrum (virtueller Punkt auf dem Dach des Mobile Mapping Fahrzeuges) ihre Position im Panoramabild ermittelt. Da pro Pixel nur die Informationen eines Punktes hinterlegt werden können, wird der zum Projektionszentrum nächste Punkt ausgewählt, falls zwei oder mehrere Punkte an der gleichen Position im Panoramabild abgebildet würden.
Das resultierende Panoramabild weist viele Lücken auf (Abb. 1 links). Um diese Lücken zu schließen wird Closing angewendet, d.h. zunächst Dilatation und anschließend Erosion (Abb. 1 mitte). Bevor bei der Dilatation ein Wert interpoliert wird, werden die in den Matrizen hinterlegten Informationen untersucht und eventuell manipuliert. Unter anderen wird ein Tiefenfilter angewendet.
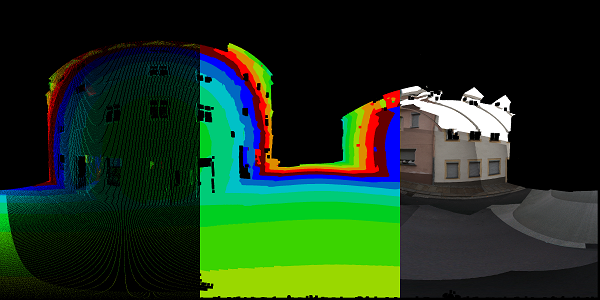
Abb. 1: Drei Bearbeitungsschritte des Panoramabildes: Abgebildete Punktwolke (links), Durch Closing geschlossene Lücken (mitte)(beide Farbkodierung anhand der Distanz des Punktes vom Projektionszentrum), Koloriertes Panoramabild (rechts)
Der Tiefenfilter ermöglicht das Ignorieren von nicht relevanten Punkten bei der Interpolation. Dadurch wird verhindert, dass nicht relevante Punkte, die zu weit im Hintergrund liegen bzw. Ausreißer im Vordergrund sind, das Ergebnis verfälschen (Abb. 2).
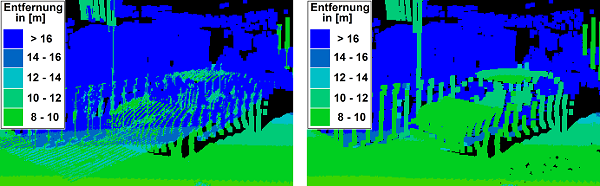
Abb. 2: Ausschnitt eines Panoramabildes ohne (links) bzw. mit (rechts) Tiefenfilter
Um das Panoramabild mit den Farbwerten der Bilddaten der Kameras zu füllen, bedarf es vor der Messfahrt einer exakten Kalibrierung der auf dem Mobile Mapping Fahrzeug montierten Sensoren.
Damit ein Pixel einen Farbwert erhält, wird zunächst ermittelt in welchem Bild der Punkt dieses Pixels abgebildet ist. Dies geschieht anhand der Footprints der Bilder. Es wird überprüft, ob die x- und y-Koordinate des Punktes innerhalb des Footprints liegt.
Ist ein Bild gefunden, das den Punkte abbildet, wird mittels der Kollinearitätsgleichungen die exakte Position der Punktes im Bild berechnet. Nun kann der Farbwert ausgelesen und ins Panoramabild übertragen werden (Abb. 1 rechts).
Das im Rahmen der Masterarbeit entwickelte Programm ermöglicht das Messen von dreidimensionalen Distanzen.