20.04.2022
Statuspräsentation für modellgesteuerte Roboter-Montage
Wanqi Zhao, Forschungsprojekt B4 (Fog Computing in DS-MSCs) hat den traditionell mindestens ein Jahr vor der Verteidigung ihrer Doktorarbeit angesiedelten Statusvortrag an ihrer Professur für Softwaretechnologie (Prof. Aßmann) gehalten.
Volatile Märkte und Kundenanforderungen machen einen Übergang vom derzeitigen Status quo der Produktion in großen, fest installierten Standorten mit traditionellen Lieferketten zu modularen Produktionseinheiten mit dynamischeren und kurzfristigeren Lieferketten erforderlich. Neue Geschäftsmöglichkeiten entstehen, wenn modulare Produktionseinheiten geleast oder von verschiedenen Akteuren der Lieferkette gemeinsam genutzt werden können. Das neuartige Konzept von softwaredefinierten mobilen Lieferketten (SD-MSC) ermöglicht eine stabile, dezentrale und modulare Produktionsweise. Montageprozesse sind wesentliche Fertigungsbestandteile, die Produktionszeit und -kosten verursachen.
Bei der Umsetzung dieses Konzepts kann der Einsatz von Robotern helfen, bei gleichzeitiger Zeit- und Kostenersparnis flexible und vielseitige Montageprozesse zu entwickeln. Die Möglichkeiten aktueller Programmierplattformen sind jedoch begrenzt, insbesondere in der Robotertechnologie. Ein Modell ist Abbildung, Beschreibung und Spezifikation der Wirklichkeit. Es kann eine unendliche Anzahl an Gegenständen und Systemen darstellen. Die modellbasierte Softwareentwicklung (MDSD) bietet einen dienstleistungsorientierten, komponentenbasierten Ansatz, um zahlreiche komplexe Probleme auf Systemebene beherrschbar zu machen. Dabei wird Roboterwissen manipuliert und von Implementierungstechnologien entkoppelt.
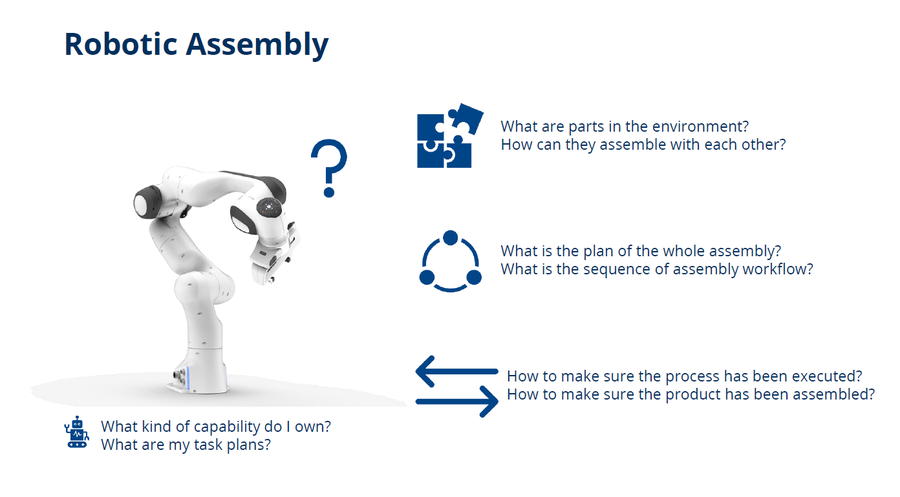
In B4 (Fog Computing in DS-MSCs) wird dafür eine übergreifende, erweiterbare und flexible Software-Architektur entwickelt. Unter Verwendung von Relationalen Referenz-Attributgrammatiken (EN: Relational Reference Attribute Grammars / Relational RAGs) werden hierbei Robotermontage RAGs (RobotRAGs) zur Modellierung von Roboter-Produktionsstraßen vorgeschlagen. Robotermontage-RAGs umfassen drei grundlegende Modelle: Roboter-Fähigkeitsmodell, Aktionsmodell und Produktmodell. Auch ein individuelles Einschränkungsmodell, um Beschränkungen in und zwischen diesen Modellen zu definieren, ist darin enthalten. Mithilfe dieser Architektur können Roboter-Montageprozesse von spezifischen, mit diesen Modellen verknüpften Produkten abgeleitet und in die Robotersteuerungsplattform integriert werden.
Frau Zhao bekam für ihren Statusvortrag an der Professur sehr positives Feedback und weitere Impulse.