NIVES
NIVES - Research Methods of Data Fusion Algorithms in Connected Vehicles in order to improve Traffic Safety
The Project is supported by the European Union and Saxony:

Project Description
Goal of the project is a high precise recognition of traffic objects. Thus data fusion algorithms are being developed, validated and implemented in a prototype. An early and distinct recognition of traffic objects and traffic situations provides an improvement for active and passive safety systems. Thereby the traffic safety can be increased.
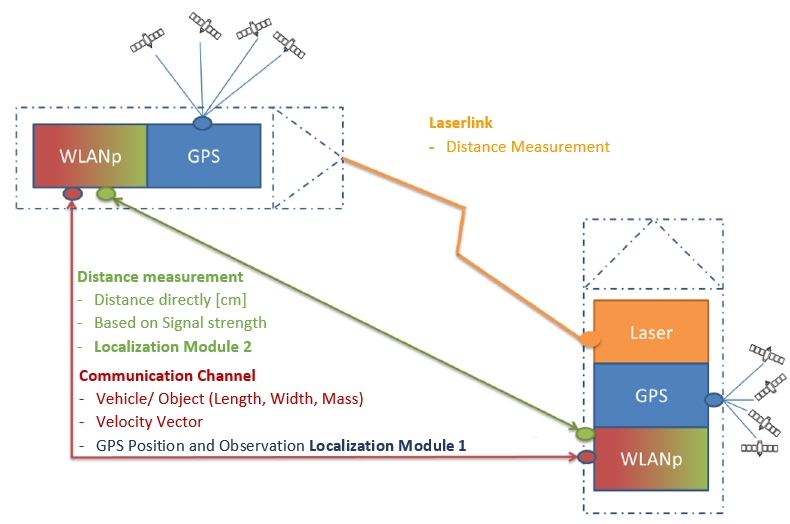
Vehicle-to-vehicle communication (V2V) provides an exchange about all status information, for example position, velocity and acceleration. These information are transmitted via WLANp. At the end the information transmitted via WLANp are fused with information from LIDAR.
Working Package ITVS
The ITVS task is to implement further messages in to the radio system in terms of vehicle configuration like vehicle length, width, mass etc. Furthermore GNSS and distance measurement based localization concepts will be implemented. Now follows a data fusion of LIDAR and WLANp data.
Technical System Integration
Promotor
SAB Sächsische Aufbaubank
Project Partner
University of Applied Sciences Dresden (Coordinator)
Faculty of Mechanical Engineering
Chair of Vehicle-Mechatronics
Prof. Dr. rer. nat. Toralf Trautmann
Project Duration
01.07.2016 – 30.06.2019
Contact
Benjamin Reichelt