Selbstadaptive funkbasierte indoor-/outdoor Positionierung für resiliente Fahrerlose Transportsysteme
Die Industrie 4.0 fordert eine erhöhte Flexibilität von Transportsystemen für die industrielle Fertigung. Im Rahmen dieses Projektes soll ein spurgeführtes fahrerloses Transportsystem (FTS) grundlegend zu einem selbstnavigierenden FTS, ohne Spurführung, entwickelt werden. Ziel ist es dabei, die Sensorik derart resilient auszuführen, dass eine unterbrechungsfreie Navigation in industriellen Umgebungen für Indoor, Outdoor und deren Übergangsbereichen realisiert werden kann. Hierzu werden die Messwerte von zwei HF-Messverfahren (UWB & BLE), einer virtuellen Odometrie, eines Inertialmesssystems mittels eines RO-SLAM-Algorithmus ausgewertet und einem intelligenten Navigationsalgorithmus mit Sensordatenfusion zugeführt. Durch die dynamische Generierung und Organisation der Ranging-Subnetze können Anwendungsflächen durch zusätzlichen Aufbau von Funk-Ankern leicht erweitert werden. Durch Teach-In können Routenbereich und Speerflächen schnell eingelernt werden. Insgesamt entsteht somit eine höhere Flexibilität und Betriebssicherheit für FTS.
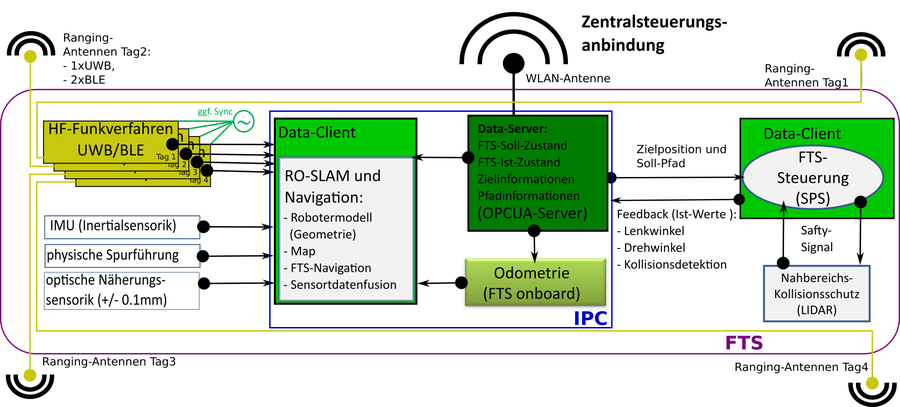
ioPs-Architektur
Aufgaben ITVS:
- Algorithmen Kartenerstellung (Basis + Erweiterungskarte)
- Algorithmen zur Selbsteinrichtung und -kalibrierung UWB/BLE-Netz
- Sensordatenfusion (Soll-Werte, virt. Odometrie, Innertialsensoren, UWB/BLE)
- Navigationsalgorithmen
- Mit der Entwicklung einer Selbstkalibrierung, Navigationsalgorithmen (RO-SLAM), den sicherheitsrelevanten Funktionen und zentraler Steuerungsfunktionen wird der Übergang zu einem FTS ohne optische oder mechanische Spurführung erreicht
Projektpartner:
-
Beldrive Engineering GmbH (www.beldrive.com)
- Metirionic GmbH (www.metirionic.com)
- deveritec GmbH (www.deveritec.de)
Laufzeit: 01.11.2021 bis 30.07.2024
Fördergeber: Bundesministerium für Wirtschaft und Energie, ZIM Zentrales Innovationsprogramm Mittelstand
Kontakt: Paul Schwarzbach