Research focuses
Our research focuses on networked systems’ low latency, flexibility, and resilience to facilitate haptic communication between humans and physical or virtual robots.
 © Giang T. Nguyen
© Giang T. Nguyen
Research focuses
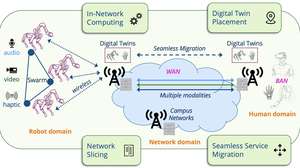
We consider networked cyber-physical systems, where an abstract network interconnects robots and humans. Humans use peripherals, such as data gloves and exoskeletons, to capture the body's posture and hand gestures to control robots remotely. Robots sense the surrounding environment via audio, video, and haptic sensors. Subsequently, robots send multiple captured modalities back to humans so that they can adjust their actions. The network connecting humans and robots has to provide low-latency and resilient connections, allowing for perceived real-time interactions.
The abstract network essentially consists of a set of networks, including but not limited to Body Area Networks (BANs), Local Area Networks (LANs), and Wide-Area Networks (WANs). To achieve extremely low-latency communication for real-time perception, the network must deploy digital models, or digital twins (DT), of humans and robots inside the networks. In-Network Computing (INC), a new paradigm, enables DT deployments by introducing computing infrastructure, application deployment, and network orchestration. Key enabling technologies for INC include, but are not limited to, Network Function Virtualization (NFV), Software-Defined Networking (SDN), and Programmable Data Planes.
In-Network Computing significantly increases network flexibility, such as deploying digital twins in close proximities and adapting paths on demand. Nevertheless, INC stills must solve several open research questions: 1.) Optimal placement of digital twins considering resource, communication, and computing constraints; 2.) Differentiating services for multiple modalities, since each has a distinct set of requirements, e.g., considering packet loss and delay; and 3.) Resilient and fault-tolerance deployment of digital twins, such as via seamless migrations.