SVAT – Schwarmverhalten autonomer Transportsysteme
Ausgangssituation
Im Bereich Fahrerloser Transportsysteme in der Intralogistik vollzieht sich derzeit eine Evolution: Von zentral gesteuerten, spurgebundenen Fahrzeugen (englisch: automated guided vehicles – AGV) hin zu spurungebundenen, autonomen Fahrzeugen (englisch: autonomous mobile robots – AMR). Die Vorzüge des Einsatzes von AMR sind hinlänglich bekannt: gegenüber ihren spur- bzw. pfadgebundenen Pendants bieten sie vor allem eine deutlich höhere Flexibilität bei gleichzeitigem Verzicht auf Fahrzeugführer.
Die Vorteile freinavigierender Fahrzeuge gehen jedoch einher mit hohen Anforderungen an praxisgerechte Steuerungsansätze bei der Routenwahl bzw. das Flottenmanagement insgesamt. Während zentrale Steuerungsansätze zu einer hohen rechentechnischen Komplexität führen, erkennen dezentrale Ansätze mögliche Routingkonflikte oft erst relativ spät – wenn ein entsprechender Ausweichvorgang und damit Zeitverlust nicht mehr verhindert werden kann.
Zielstellung und Lösungsansatz
Vor diesem Hintergrund wurden im Forschungsprojekt „SVAT“ – Schwarmverhalten autonomer Transportsysteme – Regeln für die Routenwahl freinavigierender Fahrzeuge entwickelt die bereits vor Fahrtbeginn die Wahrscheinlichkeit von Konflikten zwischen Fahrzeugen minimieren und die mit beliebigen Steuerungsansätzen für das Fahrzeugrouting kombiniert werden können. So wurden beispielsweise Ansätze entwickelt, bei denen lokale Hindernisse sowie deren Bewegung bereits für die globale Routenplanung betrachtet werden, eine Routenwahl auf Basis von Maschinellem Lernen und als vielversprechendster Ansatz das sog. Lane-Konzept.
Lane-Konzept
Beim Lane-Konzept agieren die einzelnen, autonomen Fahrzeuge nicht vollständig „egoistisch“, sondern orientieren sich an einem vordefinierten, übergeordneten Regelwerk. Das Regelwerk ist eine sogenannte Lane-Map, welche die grundsätzliche Fahrstrecke zwischen einen Start- und Zielpunkt vorgibt. Hintergrund ist die Minimierung von Begegnungsverkehr bei gleichzeitig möglichst kurzen Fahrwegen. Infolge dessen weichen die einzelnen Fahrzeuge bei der Wahl der globalen Route zwar von den kürzest möglichen Verbindungen ab, im Gesamtsystem wird aber durch die Verringerung von Konflikten eine Leistungssteigerung (z.B. höherer Durchsatz) erreicht.
Das letztlich abgeleitete Regelwerk für die Flottensteuerung freinavigierender Transportfahrzeuge kann individuell, nämlich in Abhängigkeit von Layouts, Transportflüsse und Flottengrößen erstellt werden (Beispiel: siehe Abbildungen). Im Gegensatz zu statischen Roadmaps bzw. zur pauschalen Wahl des kürzesten Weges nutzen die Fahrzeuge bei einer Lane-Map die gesamte für das Routing zur Verfügung stehende freie Fläche, was im Schnitt zu einer geringeren Fahrzeugdichte und somit geringeren Konfliktwahrscheinlichkeit führt. Dabei behalten die einzelnen Fahrzeuge trotz vorgegebene globaler Route aber ihre Flexibilität. Die Lane ist nämlich nur ein Vorschlag für die grundsätzliche Fahrstrecke, der mit jedem etablierten Ansatz zur Routenplanung kombinierbar ist. Bei lokalen Konflikten zwischen mehreren Fahrzeugen können die Fahrzeuge deshalb weiterhin autonom ihre Routen abstimmen und anpassen.
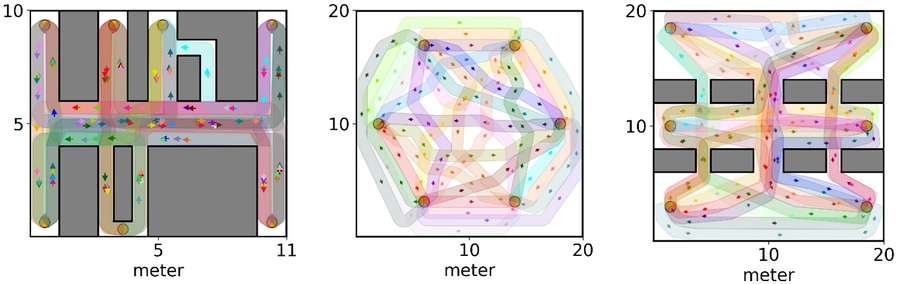
Abbildung: automatisiert generiert Lane-Maps für einfache Beispiellayouts
Ergänzend zum reinen Konzept der Lanes bzw. der Lane-Map wurde im Projekt auch eine Heuristik erarbeitet, welche automatisiert eine Lane-Map für bestimmte Bedingungen (Layout, Materialfluss, Flottengröße) erstellt. In Simulationsexperimenten konnte eine hohe Korrelation zwischen der Güte einer Lane-Map und der Performanz eines Transportsystems bestehend aus freinavigierenden Transportfahrzeugen nachgewiesen werden.
Förderhinweis
Das IGF-Vorhaben (20516 BR) der Forschungsgemeinschaft Forschungsgemeinschaft Intralogistik /Fördertechnik und Logistiksysteme e.V., wurde über die AiF Arbeitsgemeinschaft industrieller Forschungsvereinigungen „Otto von Guericke“ e.V. im Rahmen des Programms zur Förderung der industriellen Gemeinschaftsforschung und -entwicklung (IGF) vom Bundesministerium für Wirtschaft und Klimaschutz aufgrund eines Beschlusses des Deutschen Bundestages für die Zeit vom 01.01.2019 bis 31.05.2022 gefördert.