Strenge geometrische Modelle für die Unterwassertriangulation
Titel des Projekts
Strenge geometrische Modelle für die Unterwassertriangulation
Förderung / Laufzeit
Deutsche Forschungsgemeinschaft (DFG) / 2 Jahre (Start: 01/2020)
Beschreibung
Lasertriangulation, bestehend aus einem Linienlaser und einer Kamera, ist eine der weit verbreitetsten optischen 3D-Messmethoden. Diese Technologie ist auch für die präzise Vermessung von Gewässerböden von einem unbemannten Wasserfahrzeug (UWV, unmanned water vehicle) interessant. Wird Lasertriangulation unterwasser angewandt, müssen verschiedene Modifikationen des geometrischen und stochastischen Modells bei der Sensormodellierung und Kalibrierung beachtet werden. Im Verlauf des Strahlengang des Lasers aus der Luft durch eine (gläserne) Trennfläche in das Wasser werden die Strahlen an den Übergängen Luft-Glas und Glas-Wasser zweimal gebrochen.
In diesem Forschungsprojekt soll daher ein strenges geomtrisches Modell für Unterwassertriangulationssysteme entwickelt und validiert werden mit dem Fokus auf UWV-basierte Anwendungen im Bereich des Umweltmonitorings.
Im Gegensatz zu Laserbathymetrie, die typischerweise von Flugzeugen aus aufgenommen wird, können Lasertriangulationssysteme sehr kompakt und günstig aufgebaut werden. Sie können daher einfach auf einer UWV Plattform installiert werden. Die Genauigkeit und räumliche Auflösung ist viel höher als bei akkustischen Sytsmen (Echolote) oder Airborne-Laserbathymetrie. Die Nachteile, wie zum Beispiel die kleine räumliche Abdeckung oder die geringe Reichweite sind in der UWV-basierten Anwendung weniger limitierend, wenn beispielsweise kleine Flüsse für die Hochwasservorhersage kartiert werden sollen. Darüber ist die Unterwasserlasertriangulation eine interessante Messmethode für autonome Unterwasserfahrzeuge oder für die Überwachung technischer oder archäologischer Objekte.
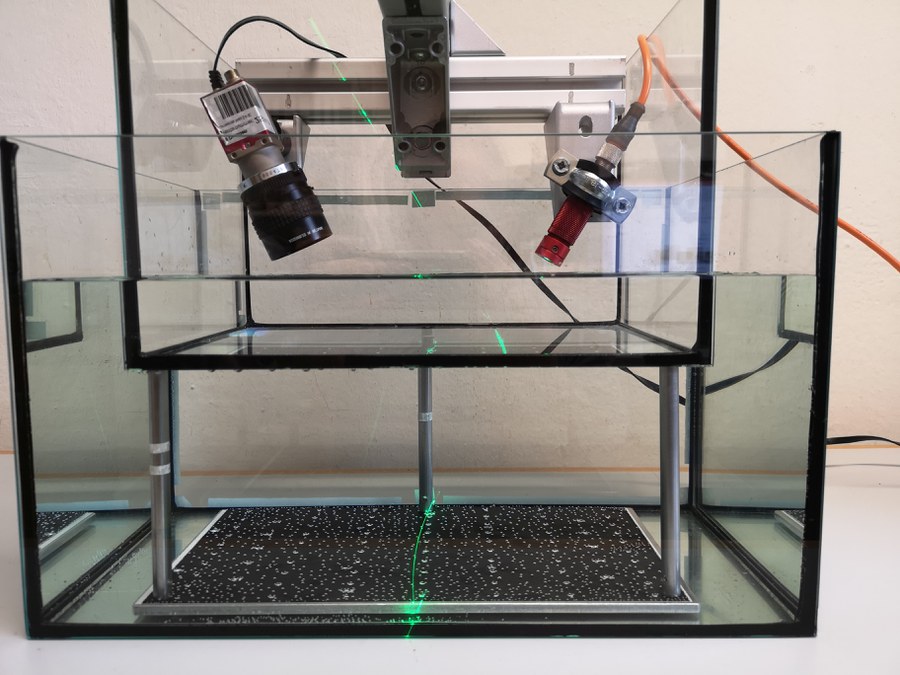
Unterwassertriangulationssystem

Strahlengang von Laser und Bildstrahlen

UWV als Sensorplattform
Relevante Publikationen
Kontakt
- M.Sc. Hannes Sardemann (Bearbeitung)
- Prof. Dr. habil. Hans-Gerd Maas (Projektleiter)