Lehrveranstaltungen
Auf dieser Seite finden Sie Informationen zu folgenden Themen:

- Vorlesungsorganisation (OPAL)
- Aktuelle Vorlesungstermine
- Studium Generale
- Vorstellung der Vorlesungen
Vorlesungsorganisation (OPAL)
Die Organisation der Lehrveranstaltung erfolgt über OPAL. Aktuelle Informationen (kurzfristige Terminänderungen, Ankündigungen, etc.) zu den Lehrveranstaltungen finden Sie im Bildungsportal Sachsen. Die Zugangsdaten werden in der ersten Lehrveranstaltung bekannt gegeben. Eine Kurzanleitung und weiterführende Informationen zum Umgang mit OPAL finden Sie unter folgendem Link: Informationen zu OPAL.
Vorlesungstermine Sommersemster 25
| Fach | 1.Termin | Raum | Zeit | Periode | OPAL |
| Fahrzeugelektronik | 09. April 2025 | JAN/27 | 9:20 - 10:50 (2.DS) | Wöchentlich Mittwochs | OPAL |
| Embedded Controller | 10. April 2025 | POT/51 | 13:00 - 14:30 (4.DS) | Wöchentlich Donnerstags | OPAL |
| Vernetzung und Kommunikation im Fahrzeug | 08. April 2025 | JAN/27 | 11:10 - 12:40 (3.DS) | Wöchentlich Dienstags | OPAL |
Studium Generale
"Fahrzeugmechatronik der Zukunft"
| Termin | Raum | Zeit | Download |
| TBD | TBD | TBD | TBD |
Vorstellung der Vorlesungen
Lehrveranstaltungen im Sommersemester
Der Umfang dieser Veranstaltung ist 2 SWS Vorlesung und 1 SWS Praktikum (2/0/1).
Eingebettete Systeme finden im Kraftfahrzeug breite Anwendung. Als Beispiel seien intelligente Sensoren benannt, welche neben der Messfunktion eine eingebettete Verarbeitungseinheit (beispielsweise einen Micro-Controller) aufweisen. Somit können diese Sensoren direkt an ein vorhandenes Kommunikationssystem angeschlossen werden und ihre bereits aufbereiteten Messwerte allen relevanten Steuergeräten zu Verfügung stellen.
Ziel dieser Lehrveranstaltung ist das Heranführen an diese Systeme, welche in der Fahrzeugentwicklung unumgänglich sind. Dabei wird im Rahmen der Vorlesung das Grundlagenwissen vermittelt und im Rahmen des angegliederten Praktikums in der Anwendung im Rahmen von Micro-Controller Programmierungen vertieft. Die Vorlesung gliedert sich in die folgenden Kapitel:
- Einführung und Motivation
- Grundlagen, Anforderungen an Einebettete Systeme
- Architekturmerkmale moderner Mikroprozessoren und -controller
- Klassifizierung, Einführung in 16-bit Mikrocontroller-Familie C166
- Komponenten von Mikrocontrollern am Beispiel des C167, Programmbeispiele
- Software (Programmierung, Echtzeitbetriebssysteme)
- Entwurfsprozess
Im Rahmen des angegliederten Praktikums werden selbstständig Micro-Controller Programmierungen verschiedener eingebetteter Systeme vorgenommen. Die Zielstellung des Praktikums ist dabei: Selbstständige Einarbeitung in ein eingebettetes System
- Hardwarenahe Programmierung in der Hochsprache C
- Umgang mit einer leistungsfähigen 16 Bit-C167-µController-Architektur
- Kennenlernen der Ansteuerung bzw. des Timing-Verhaltens externer elektronischer Baugruppen
- Erlernen des Umganges mit einem komplexen Datenblatt
| Details des Praktikums |
|---|
| Das Praktikum wird nicht an einem festgelegten Termin durchgeführt. Zunächst erfolgt eine Gruppeneinschreibung in OPAL. Jeder Gruppe wird eine Programmieraufgabe zugeteilt. Die Gruppen haben die Möglichkeit das Semester für die Programmierung zu nutzen. Dazu stehen Praktikumsplätze am Standort ABS zur Verfügung. Jeder Gruppe ist ein Betreuer zugeteilt, welcher bei Problemen zu Hilfe gezogen werden kann. Die Abnahme der erfüllten Aufgabe muss während des Semesters durch den zugeteilten Betreuer für ein erfolgreiches Bestehen des Praktikums erfolgen. Weitere Details erfolgen in der Vorlesung. |
Der Umfang dieser Veranstaltung ist 2 SWS Vorlesung und 1 SWS Praktikum (2/0/1).
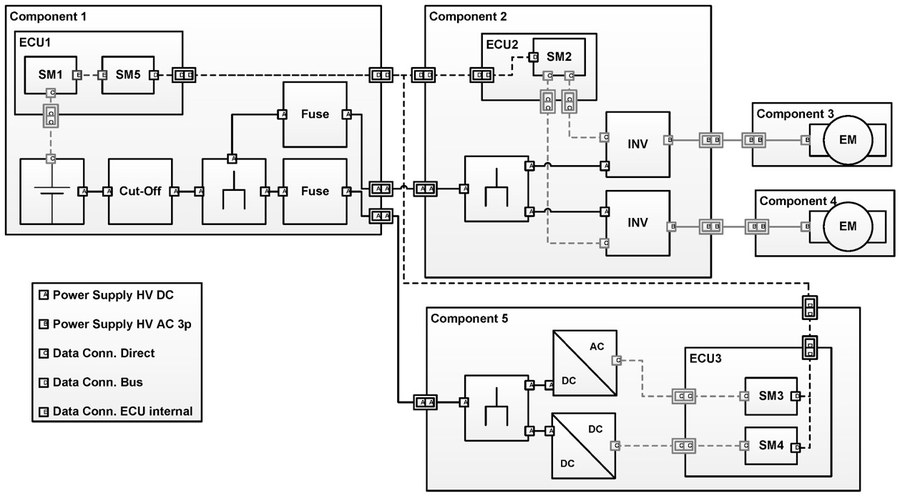
Die elektronische Teilsystem nimmt einen zentralen Stellenwert in modernen Fahrzeugen ein. Neue Funktionalitäten werden in den häufigsten Fällen elektronisch oder teilelektronisch umgesetzt. Moderne Fahrassistenzsysteme können hier als Beispiel benannt werden. Zudem werden bereits bestehende , bisherig rein mechanische Funktionalitäten zunehmend durch elektronische Umsetzungen ersetzt. Als Beispiel für diesen Trend kann die mechanische Lenksäule und moderne Stee-By-Wire Systeme angeführt werden.
Ziel dieser Lehrveranstaltung ist - im Rahmen der Vorlesung - einen tiefgehenden Einblick in die Fahrzeugelektronik zu gewährleisten und den Teilnehmenden - im Rahmen des angegliederten Praktikums - an ausgewählten Beipeilen Praxiswissen im Umgang mit den entsprechenden Technologien zu vermitteln. Dabei beinhaltet die Vorlesung die folgenden Kapitel:
- Einführung und Motivation
- Elektrisches Energiebordnetz und hybride Antriebsstränge
- Elektronische Systeme im Kraftfahrzeug
- Fahrerassistenzsysteme
- Kommunikation im Kraftfahrzeug
Die im Praktikum behandelten Beispiele konzentrieren sich auf:
- Generator und Starter
- Kennenlernen der Wirkungsweise eines Drehstromgenerators
und des elektronischen Reglers - Kennenlernen der Wirkungsweise der Startanlage
- Aufnahme von charakteristischen Kennlinien der
beiden elektrischen Maschinen
- Kennenlernen der Wirkungsweise eines Drehstromgenerators
-
Zündung/Motronik
-
Vertiefung des Grundlagenwissens von Spulenzündungen
-
Kennlernen der Komponenten eines Kfz- Motorsteuerungssysteme
-
Darstellung der Funktionsweise einer Lambda-Regelung
-
Veranschaulichung der Luftmassenmessung mit einem Heißfilmsensor
-
Messung und Darstellung der Regelgrößen einer Kfz-Motronik
-
- Kommunikation im Kraftfahrzeug – CAN
-
Kennenlernen der Kommunikation im Kraftfahrzeug über ein Controller Area Network (CAN)
-
Auslesen des CAN-Bus im Fahrzeug
-
Datenaustausch zwischen einem PC und einem Evaluation-Board
(EVA-Board) -
Auswertung des CAN-Bus-Protokolls
-
| Details des Praktikums |
|---|
| Die Teilnahme am Praktikum erfolgt gruppenweise. Die Einschreibung für die Gruppen wird über OPAL abgewickelt. Details zu den Praktikumsterminen sind in der Gruppeneinschreibung zu finden. Allgemeine Details werden in der Vorlesung bekannt gegeben. |
Der Umfang dieser Veranstaltung ist 2 SWS Vorlesung und 1 SWS Praktikum (2/0/1).
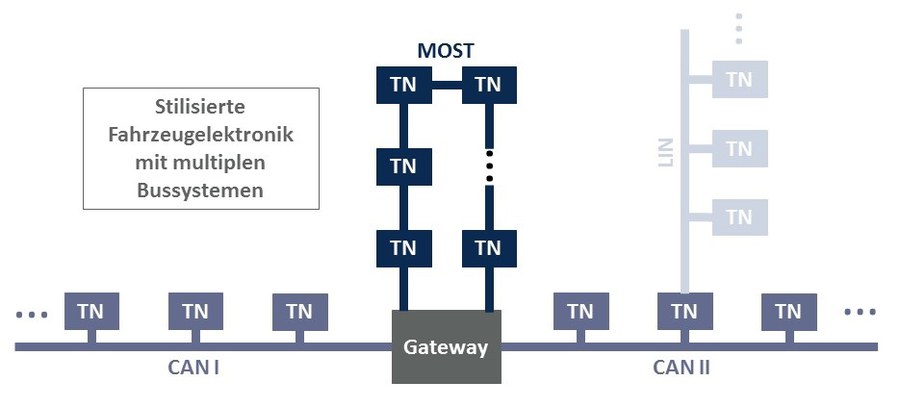
Das Kraftfahrzeug als System besteht aus vielen Teilsystemen, welche miteinander interagieren müssen. Als Beispiel sei die Aufteilung der Fahrzeugfunktionen auf eine Vielzahl von Steuergeräten zu benennen. Um den notwendigen Datenaustausch (Sensorwerte, Steuerinformationen,...) zu gewährleisten, müssen Kommunikationssysteme im Fahrzeug integriert sein. Um die Kommunikationswege minimal zu halten und den Umfang des Kommunikationssystems zu reduzieren werden serielle Bussysteme im Fahrzeug eingesetzt.
Ziel dieser Vorlesung ist die Eünführung in serielle Bussysteme, welche im Fahrzeug und Fahrzeugumfeld aktuell gebräuchlich sind. Dabei wird folgende Gliederung der Vorlesung vorgenommen:
- Einführung, Motivation
- Einordnung Kommunikationssysteme
- CAN - Controller Area Network
- LIN - Local Interconnect Network
- MOST - Media Oriented System Transport
- FlexRay
- Automotive Ethernet
- Car2Car & Car2Infrastructure Technologien
- Car2Car & Car2Infrastructure Anwendungsfälle
- Car2Server
- Safety & Security
Das im Rahmen der Lehrveranstaltung durchgeführte Praktikum hat das Ziel die in der Vorlesung gewonnen Kenntnisse am Beispiel des weit eingesetzten CAN Bussystems zu erproben. Dabei werden zunächst die Grundlagen des Bussystems vertieft und nachgehend eine Kommunikationsprogrammierung mit Anwednungsbeispiel durchgeführt. Dabei wird auch eine Restbussimulation vorgenommen, wie sie in der Entwurfspraxis vorkommen kann. Das Praktikum gliedert sich in die Teile:
- CAN Grundlagen
- Verteilte Funktionen
| Details des Praktikums |
|---|
| Die Teilnahme am Praktikum erfolgt gruppenweise. Die Einschreibung für die Gruppen wird über OPAL abgewickelt. Details zu den Praktikumsterminen sind in der Gruppeneinschreibung zu finden. Allgemeine Details werden in der Vorlesung bekannt gegeben. |
Lehrveranstaltungen im Wintersemester

Erprobung HAF Fahrzeug mit Sicherheitsfahrer und Darstellung Fahrschlauch
Mit der Veranstaltung Connected Automated Mobility vermittelt die Professur Fahrzeugmechatronik Kenntnisse und Fähigkeiten für die Systementwicklung im Bereich des hochautomatisierten Fahrens (HAF) und der Fahrassistenzsysteme (FAS).
Beispielhafte Erläuterungen und praktische Erprobungen werden auf den Hauptanwendungsbereich Straßenverkehr bezogen, jedoch werden die erörterten Systeme und Funktionen auch im Kontext weiterer Mobilitätsvarianten wie dem Schienenverkehr oder der Luftfahrt betrachtet, bzw. können dorthin übertragen werden.
In der Veranstaltung werden technische Aspekte betrachtet:
- Was umfasst das Gesamtsystem zum vollautomatisierten Fahren? Aus welchen Teilsystemen und Komponenten besteht es und wie sind die Zusammenhänge?
- Welche Sensorik wird für die notwendige Umfelderkennung eingesetzt? Wie funktionierten diese Sensoren? Wie werden diese in das Gesamtsystem integriert? Wie werden die Sensordaten verarbeitet, fusioniert und als Umgebungsabbild nutzbar gemacht?
- Wie funktioniert der Entscheidungsprozess über Navigation und Manöverplanung? Wie wird diese umgesetzt? Wie wird entschieden, welcher Fahrtrajektorie gefolgt werden soll? Wie werden die möglichen Trajektorien berechnet?
- Wie wird auf die Fahrzeugführung eingewirkt? Welche Aktoren sind notwendig und wie funktionieren diese? Wird funktioniert die Trajektorienfolgeregelung? Wie wird die Bewegung in Längs- und Querrichtung regelungstechnisch umgesetzt?
Darüber hinaus werden auch entwicklungsrelevante Aspekte betrachtet:
- Welche Regularien, Standards, Normen und Gesetze gelten für die Entwicklung und den Einsatz von automatisierten Fahrsystemen?
- Was ist die Funktionale Sicherheit (FUSI) und wie wird gemäß dieser entwickelt?
- Was ist die Safety of the Intended Functionality (SOTIF)? Wie wird diese in den Entwicklungsprozess eingebunden und welche Auswirkungen hat dies?
- Wie werden automatisierte Fahrfunktionen abgesichert und was umfasst das Testing zur Zulassung?
Um diese Kenntnisse und deren praktische Erprobung zu vermitteln, besteht die Veranstaltung sowohl aus Vorlesung, aber auch Übung und Praktika (die entsprechenden Umfänge können Sie Ihrer aktuellen Modulbeschreibung entnehmen). Neben Auslegungsaufgaben zur Systementwicklung, bereitet die Übung die Praktika bzw. Laborversuche oder Versuche am Realfahrzeug vor. Dort werden die technischen Teilaspekte wie die Sensordatenerfassung oder die Längs- und Querregelung praktisch erprobt.

Der Umfang dieser Veranstaltung ist 1 SWS Vorlesung und 1 SWS Praktikum (1/0/1).
Moderne Fahrzeuge sind in sich ein hochverteiltes System, in dem eine Vielzahl an Teilsystemen miteinander interagieren. Durch die Funktionsverteilung beispielsweise auf mehrere Steuergeräte, entstehten zusätzliche Fehlerquellen. Da die Komplexität dieses verteilten Systems "Fahrzeug" betändig wächst, steigert sich auch die Anzahl an diesen Fehlerquellen, was den Bedarf nach umfangreichen Diagnosemöglichkeiten im Fehlerfall, aber auch zur Fehlervermeidung verstärkt. Die Diagnose als wichtiger Bestandteil der heutigen Fahrzeugentwicklung ist nicht wegzudenken. Daher soll dieser Fahrzeugaspekt in dieser Vorlesung vertieft werden. Dazu ist die Vorlesung wie folgt gegliedert:
- Einleitung und Motivation Diagnose in Fahrzeugen
- Grundlagen: Prozesse Fehlererkennung, Wirkkettenanalyse
- OBD, EOBD, GVU Gesetzgeber,
- Diagnoseprotokolle und Transportprotokolle MCD-Systeme und Testertechnologien, Standards (ODX, OTX)
- Diagnosemethoden I
- Diagnosemethoden II
- Funktionsentwicklung, Entwicklungsprozess Diagnose, Wirkkettenanalysen
- Zusammenfassung
Zusätzlich soll im Rahmen der Diagnosepraktika das erlernte Wissen vertieft werden. In dem ersten Teil wird eine Diagnose an einem Beispielsystem durchgeführt, in dem bewusst Fehler eingebracht werden. In dem zweiten Teil wird eine Restbussyimulation durchgeführt, da dies Bestandteil vieler Diagnoseauslegungsprozesse ist. Das Praktikum gliedert sich demnach wie folgt:
- Versuch 1: Grundlagen, Verwendung eines Testers, Fehlersuche
- Versuch 2: Restbussimulation (Kommunikationsfehler, FH-Steuerung, Plausibilität), Diagnoseprotokolle
| Details des Praktikums |
|---|
| Die Teilnahme am Praktikum erfolgt gruppenweise. Die Einschreibung für die Gruppen wird über OPAL abgewickelt. Details zu den Praktikumsterminen sind in der Gruppeneinschreibung zu finden. Allgemeine Details werden in der Vorlesung bekannt gegeben. |

Der Umfang der Lehrveranstaltung beträgt 2 SWS Vorlesung und 1 SWS Praktikum.
Die Vorlesung „Energiemanagement und Betriebsstrategien in mobilen und stationären Energiesystemen“ hat folgende Schwerpunkte:
- Grundlagen eines übergreifenden elektrischen Energiemanagements als Kombination mobiler und stationärer Energieerzeugung und -speicherung
- Methoden und Verfahren eines zugehörigen Energiemanagements
- Charakterisierung, Prüfung und Diagnose von elektrischen Speichersystemen
- Entwurf vorausschauender Betriebsstrategien und Online-Optimierung (Modellierung, Simulation von Betriebsstrategien)
Nach Abschluss ist der Studierende in der Lage Energiemanagementsysteme und Betriebsstrategien zu entwickeln, zu bewerten und zu optimieren. Dabei gliedert sich die Vorlesung in folgende Kapitel:
- Einführung und Grundlagen
- Energiespeicher Arten, Mess- und Prüfverfahren, Diagnose
- Management von Energiespeichern
- EE Architekturen und Bordnetz
- Evolutionsstufen des Energiemanagements
- Mobiles Energiemanagement und Betriebsstrategien
- Optimierungsverfahren und Anwendung
- Modellierung und Simulation
Im Rahmen des Praktikums werden zwei Modellierungs- und Simulationsversuche durchgeführt um die Inhalte der Vorlesung zu vertiefen. Dabei werden folgende Themen behandelt:
- Versuch 1: HV-Batteriemodellierung
- Versuch 2: Auslegung eines Batteriemanagementsystems (BMS)
| Details des Praktikums |
|---|
| Die Teilnahme am Praktikum erfolgt gruppenweise. Die Einschreibung für die Gruppen wird über OPAL abgewickelt. Details zu den Praktikumsterminen sind in der Gruppeneinschreibung zu finden. Allgemeine Details werden in der Vorlesung bekannt gegeben. |

Der Umfang dieser Veranstaltung ist 2 SWS Vorlesung und 1 SWS Übung (2/1/0).
Mechatronische Systeme sind in nahezu jeglichen Anwendungs- bzw. Produktbereichen zu finden. Die methodensichere Integration der Einzeldisziplinen Maschinebau, Elektrotechnik und Informatik im Rahmen des Systementwurfes ist ein wichtiger Bestandteil neuer, innovativer Entwicklungen.
Ziel dieser Vorlesung ist der Aufbau von Grundlagenwissen mechatronischer Systeme und deren Entwicklungspraxis. Somit soll nach Abschluss der Vorlesung ein Verständnis für das methodisch einwandfreie Vorgehen im Entwurf dieser Systeme entstanden sein. Um eben dieses Ziel zu erreichen, beginnt die Vorlesung mit den theoretischen Grundlagen des Systementwurfes. Darauf folgend werden einige Systemkomponenten wie Sensoren, Aktoren und verarbeitende Elemente nähergehend betrachtet, um auch den praxisbezogenen Wissensumfang zu erhöhen. Schließlich werden auf aktuelle Herausforderungen und Trends der Systementwicklung eingegangen, welche sich von verteilten Systemen über die aktuell starke Ausprägung und Nutzung virtueller Entwurfsmethoden, bis hin zu dem automatisierten Systementwurf erstrecken. Die Vorlesung gliedert sich dabei in die folgenden Kapitel:
- Einführung und Grundlagen Mechatronischer Systeme
- Allgemeine Entwurfsstrategien
- Bestandteile Mechatronischer Systeme (Eingabe-Verarbeitung-Ausgabe)
- Verteilte Systeme
- Virtuelle Entwurfsmethoden
- Automatisierter Systementwurf
Der Umfang dieser Veranstaltung ist 2 SWS Vorlesung und 1 SWS Praktikum (2/0/1).
Die elektronische Teilsystem nimmt einen zentralen Stellenwert in modernen Fahrzeugen ein. Neue Funktionalitäten werden in den häufigsten Fällen elektronisch oder teilelektronisch umgesetzt. Moderne Fahrassistenzsysteme können hier als Beispiel benannt werden. Zudem werden bereits bestehende , bisherig rein mechanische Funktionalitäten zunehmend durch elektronische Umsetzungen ersetzt. Als Beispiel für diesen Trend kann die mechanische Lenksäule und moderne Stee-By-Wire Systeme angeführt werden.
Ziel dieser Lehrveranstaltung ist - im Rahmen der Vorlesung - einen tiefgehenden Einblick in die Fahrzeugelektronik zu gewährleisten und den Teilnehmenden - im Rahmen des angegliederten Praktikums - an ausgewählten Beipeilen Praxiswissen im Umgang mit den entsprechenden Technologien zu vermitteln. Dabei beinhaltet die Vorlesung die folgenden Kapitel:
- Einführung und Motivation
- Elektrisches Energiebordnetz und hybride Antriebsstränge
- Elektronische Systeme im Kraftfahrzeug
- Fahrerassistenzsysteme
- Kommunikation im Kraftfahrzeug
Die im Praktikum behandelten Beispiele konzentrieren sich auf:
- Generator und Starter
- Kennenlernen der Wirkungsweise eines Drehstromgenerators
und des elektronischen Reglers - Kennenlernen der Wirkungsweise der Startanlage
- Aufnahme von charakteristischen Kennlinien der
beiden elektrischen Maschinen
- Kennenlernen der Wirkungsweise eines Drehstromgenerators
-
Zündung/Motronik
-
Vertiefung des Grundlagenwissens von Spulenzündungen
-
Kennlernen der Komponenten eines Kfz- Motorsteuerungssysteme
-
Darstellung der Funktionsweise einer Lambda-Regelung
-
Veranschaulichung der Luftmassenmessung mit einem Heißfilmsensor
-
Messung und Darstellung der Regelgrößen einer Kfz-Motronik
-
- Kommunikation im Kraftfahrzeug – CAN
-
Kennenlernen der Kommunikation im Kraftfahrzeug über ein Controller Area Network (CAN)
-
Auslesen des CAN-Bus im Fahrzeug
-
Datenaustausch zwischen einem PC und einem Evaluation-Board
(EVA-Board) -
Auswertung des CAN-Bus-Protokolls
-
| Details des Praktikums |
|---|
| Die Teilnahme am Praktikum erfolgt gruppenweise. Die Einschreibung für die Gruppen wird über OPAL abgewickelt. Details zu den Praktikumsterminen sind in der Gruppeneinschreibung zu finden. Allgemeine Details werden in der Vorlesung bekannt gegeben. |
Kontakt bei Fragen
 © Lehrstuhl für Fahrzeugmechatronik
© Lehrstuhl für Fahrzeugmechatronik
Wissenschaftlicher Mitarbeiter
NameDipl.-Ing. Andreas Zäper
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).