Lectures
Please take note: All lectures, theoretical and practical excercises, as well as the extracurricular studies are held in German.
On this page you will find information on the following topics:

- Lecture organization (OPAL)
- Current lecture dates
- Extracurricular studies
- Presentation of the lectures
Lecture organization (OPAL)
Organisation of the courses is done via OPAL. For more information on current lectures (announcements, short notice appointment changes etc.) see "Bildungsportal Sachsen". Login details will be announced in class. Additional information can be found here: information on OPAL.
*Enrollment to a exam group via enrollment list in the secretariat Jante-Bau Room 1.
** The exams for EMS and EMBS are offered as singular exams and together as modular exam. All variations of the exam take place at the same time in the same place. Details can be found on the OPAL pages of the lectures.
Exam Dates Winter Term 24/25
| Fach | Datum | Raum |
Beginn |
OPAL |
| TBD | TBD | TBD | TBD | TBD |
Lecture Dates Winter Term 24/25
| Lecture | 1. Date | Room | Time | Schedule | OPAL |
| Automatisierte und vernetzte Mobilität | 17. October 2024 | JAN/27 | 13:00-14:30 (4.DS) | Weekly | OPAL |
| Diagnose in mechatronichen Fahrzeugsystemen | 15. October 2024 | JAN/27 | 16:40-18:10 (6.DS) | Weekly | OPAL |
| Entwurf mechatronischer Systeme | 16. October 2024 | POT/81 | 13:00-14:30 (4.DS) | Weekly | OPAL |
| Energiemanagement und Betriebsstrategien | 17. October 2024 | POT/51 | 11:10-12:40 (3.DS) | Weekly | OPAL |
| Fahrzeugelektronik | 15. October 2024 | JAN/27 | 09:20-10:50 (2.DS) | Weekly | OPAL |
Extracurricular Studies
"Fahrzeugmechatronik der Zukunft"
| Date | Room | Time | Download |
|
TBD |
TBD | TBD | TBD |
Presentation of the lectures
Lectures in the summer term
The lecture consists of one lecture (2 SWS=90 minutes per week) and practical exercise (1 SWS=45 minutes a week) (2/0/1).
Embedded systems are used in a wide range of applications. An instance of that are intelligent sensors which not only have a measurement function but also an embedded processing unit (e.g. a microcontroller). This allows the sensors to be directly connected to a communication system and makes all data available to the relevant control units.
The aim of this course is to introduce the students to those systems which are necessary in vehicle design. As part of the lecture, the relevant basic knowledge will be imparted, and in the practical training improved (with microcontroller programming). The lecture encompasses the following topics:
- Introduction and Motivation
- Basics, Requirements for the Embedded Control Systems
- Architectural Features of Modern Microcontrollers and Microprocessors
- Classification, Introduction to 16-Bit Microcontroller Architecture (the C166 Family)
- Components of Microcontrollers (Using the Example of the C167), Samples of Programmes
- Software (Programming, Real-Time Operating Systems)
- Design Process
In the practical training, students are required to independently programme microcontrollers of various embedded systems. The course objective is: becoming acquainted with an embedded system.
- Hardware-Based Programming (C programming)
- Handling of the Architecture of a 16-bit C167 Microcontroller
- Introduction to the Activation of External Electronic Assemblies and Their Timing Behaviour
- Handling of Complex Data Sheets
| Details of the Practical Exercise |
|---|
|
There is no exact date for the practical training. First of all, student groups are asked to enrol via OPAL. Then, every group is given a programming task which they have to solve over the course of the semester. Students can use the facilities in Jante-Bau and Falkenbrunnen. Every group has a supervisor who can be consulted whenever problems arise. It is also the supervisor who has to accept the solutions to the task. This is necessary for passing the training. Further details will be given in the lecture. |

This lecture encompasses a lecture (2 SWS=90 minutes a week) and practical exercise (1 SWS=45 minutes per week) (2/0/1).
Electronic subsystems play an essential role in modern vehicles. New features are most often realised electronically or at least partly electronically. Modern driver assistance systems are an example of that. Furthermore, already existent, purely mechanical features are increasingly replaced by electronic features. Examples of that are the mechanical steering post and the modern steer-by-wire technology.
The aim of this course is to give students an insight into vehicle electronics (as part of the lecture) and to impart practical knowledge about the handling of the technologies discussed in class (as part of the practical training). The lecture encompasses the following topics:
- Introduction and Motivation
- On-board Electrical Systems for Power Supply and Hybrid Drivetrains
- Electronic Systems in Motor Vehicles
- Advanced Driver Assistance Systems
- Communication in Motor Vehicles
The practical exercise focuses on:
- Generator and Starter
- Becoming acquainted with the principle of operation of three-phase generators and electronic controllers
- Becoming acquainted with the principle of operation of start systems
- Getting to know the characteristics of both electrical machines
-
Ignition/Motronic
- Deepening of Basic Knowledge About Coil Ignition
- Learning about the Components of Engine Control Systems
- Mode of Operation of Lambda Control
- Illustration of Air Mass Measurement with a Hot Film Mass Airflow Sensor
- Metering and Depiction of Control Variables of Vehicle Motronic
- Communication in the Vehicle – CAN
- Learning about the communication in the vehicle via a controller area network (CAN)
- Readout of the CAN bus in the vehicle
- Data exchange between a PC and an evaluation board (eval board)
- Evaluation of CAN bus protocols
| Details of the Practical Exercise |
|---|
| Participation in the training is done in groups. The students are asked to enrol via OPAL. Details concerning the dates of the training can be found in the group enrolment on OPAL. Further details are given in the lecture. |
This course consists of a lecture (2 SWS=90minutes a week) and practical exercise (1 SWS=45 minutes per week) (2/0/1).
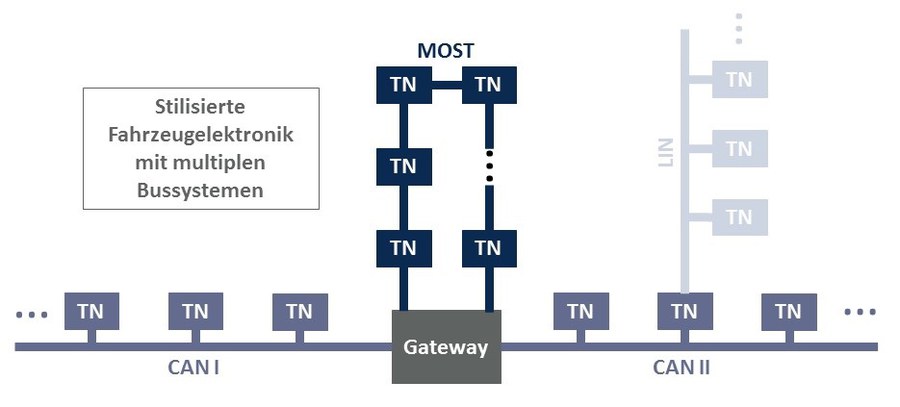
The motor vehicle as a system as such is made up of various subsystems which need to interact with each other, e.g. allocation of vehicle features to various control units. In order to provide the necessary data exchange (sensor values, control information etc.), communication systems are implemented in the vehicle. Serial bus systems are used to keep communication channels short and to reduce the complexity of the communication systems
The aim of this course is to introduce students to serial bus systems which are currently used in vehicles. The lecture encompasses the following topics:
- Introduction, Motivation
- Classification Communication Systems
- CAN - Controller Area Network
- LIN - Local Interconnect Network
- MOST - Media Oriented System Transport
- FlexRay
- Automotive Ethernet
- Car2Car & Car2Infrastructure Technologies
- Car2Car & Car2Infrastructure Use Cases
- Car2Server
- Safety & Security
In practical training, students get the opportunity to field-test the knowledge they have gained in the lecture, using CAN bus systems. In order to do that, the basics of bus systems are concentrated on and then students are required to accomplish a communication programming task. Part of that is also restbus simulation (since one will come across this in the design process). Practical training consists of:
- Basics of CAN
- Distributed functions
| Details of Practical Training |
|---|
| Participation in the training is done in groups. The students are asked to enrol via OPAL. Details concerning the dates of the training can be found in the group enrolment on OPAL. Further details are given in the lecture. |
Lectures in the Winter Term
Connected Automated Mobility

Testing HAF vehicle with safety driver and display of driving path
With the Connected Automated Mobility lecture, the Professorship of Vehicle Mechatronics imparts knowledge and skills for system development in the field of highly automated driving (HAD) and automated driver assistance systems (ADAS).
Example explanations and practical tests are related to the main application area of road traffic, but the systems and functions discussed are also considered in the context of other mobility variants such as rail transport or aviation, or can be transferred there.
The event looks at technical aspects:
- What does the overall system for fully automated driving include? What subsystems and components does it consist of and how are the relationships?
- Which sensors are used for the necessary environment detection? How do these sensors work? How are they integrated into the overall system? How are the sensor data processed, merged and made usable as an image of the environment?
- How does the decision-making process for navigation and maneuver planning work? How is this implemented? How is it decided which driving trajectory should be followed? How are the possible trajectories calculated?
- How is the vehicle guidance influenced? Which actuators are necessary and how do they work? Does the trajectory tracking control work? How is the movement in the longitudinal and transverse directions implemented in terms of control technology?
In addition, development-relevant aspects are also considered:
- Which regulations, standards, norms and laws apply to the development and use of automated driving systems?
- What is Functional Safety (FUSA) and how is it developed in accordance with it?
- What is the Safety of the Intended Functionality (SOTIF)? How is this integrated into the development process and what effects does it have?
- How are automated driving functions secured and what does testing for approval include?
In order to convey this knowledge and its practical testing, the event consists of lectures, exercises and practical courses (you can find the relevant scope in your current module description). In addition to design tasks for system development, the exercise prepares the practical courses or laboratory tests or tests on real vehicles. There, technical aspects such as sensor data acquisition or longitudinal and lateral control are experienced in practice.

This course consists of a lecture (1 SWS=45 minutes per week) and practical training (1 SWS=45 minutes a week) (1/0/1).
Modern vehicles are highly-distributed systems in which various subsystems interact with each other. Functional distribution can be a source of error. Since the complexity of the distributed system "Vehicle" constantly increases, the sources of error also increase, which asks for comprehensive possibilities for fault finding (in the case of an error) and fault prevention. Diagnostics are an integral part of today’s automotive engineering, which is why this topic will be explored further in this lecture. The lecture encompasses the following topics:
- Introduction and Motivation Diagnostics of Vehicles
- Basics: Process Error Detection, Event Chain Analysis
- On-Board Diagnostics (OBD), European On Board Diagnostics (EOBD), GVU German Legislature
- Diagnostic Protocols and Transport Protocols, MCD-Systems, Testing Technologies, Standards (ODX, OTX)
- Diagnostic Methods I
- Diagnostic Methods II
- Function Development, Development Process, Diagnostics, Event Chain Analyses
- Summary
Additionally, in the practical training, students will deepen their knowledge. In part one, students are asked to diagnose a fault in an example system. In part two, students carry out a restbus simulation since this is an integral part of most diagnostics design processes. The practical training encompasses the following:
- Exercise 1: Basics, Application of a Tester, Diagnostics
- Exercise 2: Restbus Simulation (Communication Error, Window Lifter Control, Plausibility), Diagnostic Protocols
| Details of Practical Training |
|---|
| Participation in the training is done in groups. The students are asked to enrol via OPAL. Details concerning the dates of the training can be found in the group enrolment on OPAL. Further details are given in the lecture. |

This course consists of a lecture (2 SWS=90minutes a week) and practical training (1 SWS=45minutes per week).
The lecture “Energy Management and Operational Strategies for Mobile and Stationary Energy Systems” covers the following topics:
- Basics of comprehensive electrical energy management as a combination of mobile and stationary energy generation and storage
- Methods and processes of related energy management
- Characterisation, scrutiny and diagnostics of electric storage systems
- Blueprint of anticipatory operational strategies and online optimisation (modelling, simulation of operational strategies)
After having completed the course, students are able to develop, assess and optimise energy management systems and operational strategies. The lecture encompasses the following:
- Introduction and Basics
- Energy Storage: Types, Measurement and Testing Methods, Diagnostics
- Management of Energy Storage
- E/E Architectures and Power System
- Evolutionary Stages of Energy Management
- Mobile Energy Management and Operational Strategies
- Optimisation Technique and Application
- Modelling and Simulation
In practical training, students are required to use two modelling and simulation test methods in order to deepen their knowledge of the topics discussed in the lecture. The following topics will be covered:
- Exercise 1: HV Battery Modelling
- Exercise 2: Design of a Battery Management System (BMS)
| Details of Practical Training |
|---|
| Participation in the training is done in groups. The students are asked to enrol via OPAL. Details concerning the dates of the training can be found in the group enrolment on OPAL. Further details are given in the lecture. |

The course consists of a lecture (2 SWS=90 minutes per week) and a theoretical exercise (1 SWS=45 minutes a week) (2/1/0).
Mechatronic systems are part of nearly all technical applications and products. The substantiated integration of the single disciplines mechanical engineering, electrical engineering, and informatics in the scope of system design, is a crucial element of new and innovative developments.
The aim of this course is to impart basic knowledge of mechatronic systems and their development practice. After having attended the lectures, students will have an understanding of methodologically sound procedures in design. Subsequently, system components like sensors, actuators and processing elements are focused on in order to relate the contents of the lecture to practice. Finally, current challenges and trends in system design will be discussed (e.g. distributed systems, current characteristics and application of virtual design methods as well as automated system design). The lecture encompasses the following topics:
- Introduction to and Basics of Mechatronic Systems
- General Design Strategies
- Components of Mechatronic Systems (Input – Processing – Output)
- Distributed Systems
- Virtual Design Methods
- Automated System Design
This lecture encompasses a lecture (2 SWS=90 minutes a week) and practical exercise (1 SWS=45 minutes per week) (2/0/1).
Electronic subsystems play an essential role in modern vehicles. New features are most often realised electronically or at least partly electronically. Modern driver assistance systems are an example of that. Furthermore, already existent, purely mechanical features are increasingly replaced by electronic features. Examples of that are the mechanical steering post and the modern steer-by-wire technology.
The aim of this course is to give students an insight into vehicle electronics (as part of the lecture) and to impart practical knowledge about the handling of the technologies discussed in class (as part of the practical training). The lecture encompasses the following topics:
- Introduction and Motivation
- On-board Electrical Systems for Power Supply and Hybrid Drivetrains
- Electronic Systems in Motor Vehicles
- Advanced Driver Assistance Systems
- Communication in Motor Vehicles
The practical exercise focuses on:
- Generator and Starter
- Becoming acquainted with the principle of operation of three-phase generators and electronic controllers
- Becoming acquainted with the principle of operation of start systems
- Getting to know the characteristics of both electrical machines
-
Ignition/Motronic
- Deepening of Basic Knowledge About Coil Ignition
- Learning about the Components of Engine Control Systems
- Mode of Operation of Lambda Control
- Illustration of Air Mass Measurement with a Hot Film Mass Airflow Sensor
- Metering and Depiction of Control Variables of Vehicle Motronic
- Communication in the Vehicle – CAN
- Learning about the communication in the vehicle via a controller area network (CAN)
- Readout of the CAN bus in the vehicle
- Data exchange between a PC and an evaluation board (eval board)
- Evaluation of CAN bus protocols
| Details of the Practical Exercise |
|---|
| Participation in the training is done in groups. The students are asked to enrol via OPAL. Details concerning the dates of the training can be found in the group enrolment on OPAL. Further details are given in the lecture. |
Contact for questions
 © Lehrstuhl für Fahrzeugmechatronik
© Lehrstuhl für Fahrzeugmechatronik
Research and Teaching Fellow
NameDipl.-Ing. Andreas Zäper
Send encrypted email via the SecureMail portal (for TUD external users only).