FAST TRAFFIC
Projektbeschreibung
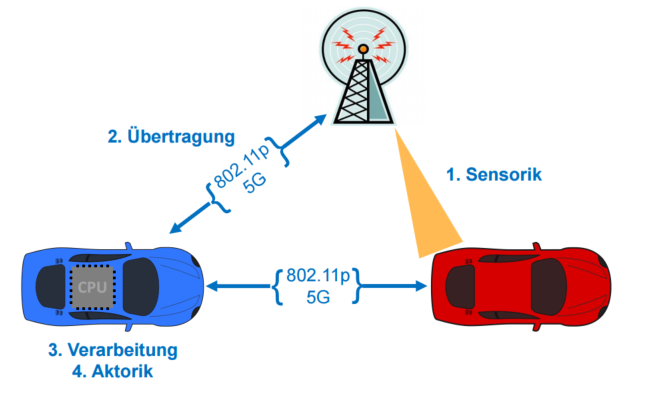
Ziel des Forschungsvorhabens fast-traffic ist die Erforschung, Entwicklung und Demonstration der Technologiebasis für eine echtzeitfähige Vernetzung von Fahrzeugen untereinander und mit der Infrastruktur. Die echtzeitfähige Vernetzung wird die Voraussetzung für die Assistenzsysteme der Zukunft schaffen und die Sicherheit im Straßenverkehr massiv erhöhen. Um die dafür notwendige niedrige Ende-zu-Ende-Latenz zu erreichen müssen alle beteiligten Komponenten im Hinblick auf die Zeitverzögerung optimiert werden. Es werden daher neue Sensoren entwickelt, Kommunikationsstandards optimiert und Datenfusionsalgorithmen beschleunigt.
Aufgaben ITVS
Die Aufgabe der Professur Informationstechnik für Verkehrssysteme besteht u.a. in der Entwicklung einer hochpräzisen und integren Lokalisierung, die stark von einer reduzierten Latenz des Datenaustauschs zwischen Fahrzeugen profitiert. Durch den Austausch von GPS Rohdaten zwischen Fahrzeugen kann der Positionsfehler stark verringert werden, wenn dieser Austausch mit einer definierten, niedrigen Latenz geschieht. Durch weitere Augmentierungssysteme (optische Umfelderkennung, Fahrwerkdatenauswertung) wird der Fehler weiter gesenkt, gleichzeitig wird die Integrität der Position bestimmt. Die Ergebnisse werden in einem Demonstrator integriert und innerhalb eines Usecases veranschaulicht.
Fördermittelgeber:
Bundesministerium für Bildung und Forschung
Projektträger:
Projektträger Jülich, Forschungszentrum Jülich GmbH
Projektkoordinator:
TUD PSN
Projektpartner:
TUD MNS
Autonomos GmbH, Berlin
BASELABS GmbH, Chemnitz
Green Way Systems GmbH, Frankfurt (Oder)
IHP GmbH – Innovations for High Performance Microelectronics/ Leibniz-Institut für innovative Mikroelektronik, Frankfurt (Oder)
Institut für Automation und Kommunikation e.V., Magdeburg
Lesswire GmbH, Berlin
Projektlaufzeit:
01.03.2016-28.02.2019
Ansprechpartner:
Paula Tauscher