Harvester-Navi – Entwicklung eines Navigationsassistenzsystems für Forst-Harvester auf Basis nicht georeferenzierter Ortungsnetze
Harvester-Navi – Entwicklung eines Navigationsassistenzsystems für Forst-Harvester auf Basis nicht georeferenzierter Ortungsnetze
Ziel des Projektes ist die Entwicklung eines Navigationsassistenzgerätes als Anbaulösung für den Harvester zur Steigerung der Arbeitsproduktivität und der gleichzeitigen Entlastung des Harvester-Fahrers. Dieses trägt die für die Fällarbeiten relevanten Informationen zusammen und stellt diese dem Maschinenführer in einfacher und übersichtlicher Form zur Verfügung. Als relevante Informationen sind dabei aus heutiger Sicht anzusehen:
- Position des Harvesters
- zu fällende Bäume in der Umgebung des Harvesters
- Rückegassen und Forstwege
-
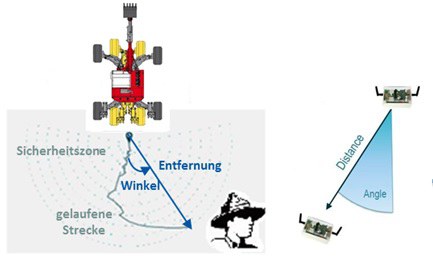
Position von Arbeitern (Zufäller) und Arbeitsgeräten, zu welchen aus Arbeitsschutzgründen ein Mindest-Sicherheitsabstand einzuhalten ist (Aufgabe ITVS)
-
weitere relevante Informationen
Sicherheitssystem Harvester
Projektpartner:
- Metirionic GmbH (www.metirionic.com)
- Trans4mation IT GmbH (www.trans4mation.de)
- TU Dresden; Institut für Verkehrstelematik (www.tu-dresden.de/vkw/itvs)
- Sachsenforst (assoz. Partner; www.sbs.sachsen.de)
- John Deere Forestry Oy, Tampere, Finland (assoz. Partner; www.deere.fi)
Laufzeit: 10/2020 - 03/2023
Fördergeber: Bundesministerium für Wirtschaft und Energie, ZIM Zentrales Innovationsprogramm Mittelstand
Kontakt: Robert Richter