Harvester-Navi - Development of a navigation assistance system for forest harvesters based on non-georeferenced positioning networks
Harvester-Navi - Development of a navigation assistance system for forest harvesters based on non-georeferenced positioning networks
The objective of the project is the development of a navigation assistance device as an add-on solution for the harvester to increase work productivity and at the same time relieve the harvester driver. This device collects the information relevant for felling operations and makes it available to the machine operator in a simple and clear form. From today's point of view, the relevant information is:
- Position of the harvester
- trees to be felled in the area around the harvester
- Backroads and forest roads
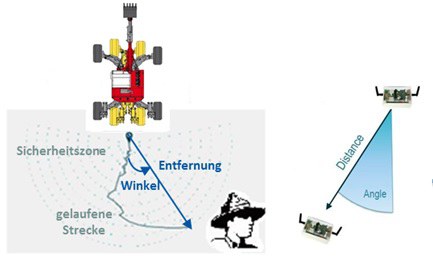
- Position of workers and equipment to which a minimum safety distance must be maintained for occupational safety reasons (ITVS task)
- other relevant information
Harvester Safety System
Project partners:
- Metirionic GmbH (www.metirionic.com)
- Trans4mation IT GmbH (www.trans4mation.de)
- TU Dresden; Institut für Verkehrstelematik (www.tu-dresden.de/vkw/itvs)
- Sachsenforst (assoc. partner; www.sbs.sachsen.de)
- John Deere Forestry Oy, Tampere, Finland (assoc. partner; www.deere.fi)
Duration: 10/2020 - 03/2023
Federal Ministry of Economics and Energy, ZIM Central Innovation Program for Medium-Sized Enterprises
Contact: Robert Richter