Drittmittel
Nachfolgend ist ein Übersicht von Forschungsvorhaben mit Beteiligung der Professur für Flugmechanik und Flugeregelung gegeben.
Aktuell:
Laufzeit: 2025-2026
Projekttraeger: Deutsches Bundesministerium für Energie und Wirtschaft
Ansprechpartner: Carl Winkler
Micro-Launcher stehen vor neuen Herausforderungen, welche nicht mit den Technologien der konventionellen Trägerraketen überwunden werden können und neue Ansätze erfordern. Im Rahmen von “GNOMIC”, strebt das Konsortium bestehend aus Astos Solutions, TU Dresden und der kanadischen Micro-Launcher Firma Reaction Dynamics (RDX) die Entwicklung eines sicheren und robusten Avioniksystems für RDX‘s Micro-Launcher an. Das zu entwickelnde Navigations, Steuer- und Lenksystem (engl. GNC System) System wird auf Basis modernster Technologien flexibel auf verschiedene Nutzlasten und Missionsprofile anwendbar sein. Hauptbestandteil der Entwicklung wird die Untersuchung und Regelung des Triebwerks mittels liquid injection Schubvektorsteuerung (LITVC), sowie die Weiterentwicklung einer hybriden Navigation mit multiplen und kostengünstigen IMU Sensoren.
Die Steuer- und Regelalgorithmen basieren auf modernsten Methoden der robusten und optimalen Steuerung. Dies reduziert im Gegensatz zu existierenden Lösungen den Rekonfigurationsaufwand zwischen Missionen, verringert Kosten und steigert die Agilität. Validiert wird die Entwicklung sowohl in Simulation als auch in einer Echtzeit Hardware-Testumgebung.
Laufzeit: 2025-2027
Projekttraeger: ESA
Ansprechpartner: Markus Lötzsch
Der Kostendruck auf die Raumfahrindustrie nimmt stetig zu, obwohl die Komplexität der Satellitensysteme immer weiter steigt. Dies birgt die Gefahr einer Kostenexplosion bei künftigen Missionen, wenn nicht rechtzeitig gegengesteuert wird. Die hier vorgeschlagene Studie ist ein wesentlicher Schritt, um diesem riskanten Trend entgegenzuwirken, indem die industrielle Effizienz gesteigert wird. Die Verifizierungs- und Validierungsaktivitäten (V&V) machen etwa 30-60% der Gesamtkosten des Attitude and Orbit Control Systems (AOCS) aus. Dieser hohe Anteil rechtfertigt, dass "V&V" der Schwerpunkt dieser Studie ist. Die Studie zielt darauf ab, die Lücke zwischen der in den Forschungsinstituten verfügbaren V&V-Technologie Forschungsinstituten und der in der Industrie etablierten V&V-Technologie Industrie zu reduzieren.
Laufzeit: 2024-2025
Projekttraeger: ESA
Ansprechpartner: Frederik Thiele
Der ständig wachsende Ehrgeiz bei Weltraummissionen treibt die Komplexität von Raumfahrzeugen in die Höhe, was zu Verbundbaugruppen führt, deren dynamisches Verhalten bei der Konstruktion und bei Offline-Bewertungen in der Umlaufbahn mit herkömmlichen Schätzverfahren nicht mit dem erforderlichen Grad an Sicherheit vorhergesagt werden kann. Es wird erwartet, dass Echtzeit-Systemidentifizierungsverfahren (SysID) in diesen Fällen das Design des Fluglagen- und Bahnkontrollsystems (AOCS) erheblich unterstützen, um die gewünschte Leistung zu erreichen.
Laufzeit: 2024 - 2025
Projektträger: BMDV
Ansprechpartner: Sebastian Schubert
Mit der fortschreitenden Entwicklung der UAS-Systeme ergeben sich in Zukunft weitere großflächige Einsatzbereiche, wie Windschadensanalysen an Verkehrsinfrastruktur oder dem Liefern von Paketen. Für die großflächige Umsetzung, wie zum Beispiel das Abfliegen einer kilometerlangen Bahnstrecke mit vermuteten Orkanschäden, spielt die Reichweite eine große Rolle. Diese ist bei batterie-elektrisch angetriebenen UAS überwiegend durch das Gewicht der Batterie begrenzt. Dieses Projekt soll dazu beitragen, basierend auf unterschiedlichsten zur Verfügung stehenden Daten eine besonders energieeffiziente Route entlang der Aufgabenstrecke zu finden, um damit die Reichweite zu verlängern, längere Flüge für einen größeren Beobachtungszeitraum zu ermöglichen und letztlich die Systeme nachhaltiger zu betreiben.
Die Effizienzsteigerung von UAS durch Reduktion des notwendigen Energieverbrauchs soll unter Ausnutzung des Windfeldes bei Missionsflügen entlang von Verkehrsinfrastruktur geschehen. Ziel des Projekts ist daher die die Gewinnung von Flugversuchsdaten von den im Gesamtsystem integrierten Sensoren zur Windfeldmessung in Bezug zu Vorhersage- und Wetterstationsdaten.
Dazu wird im Rahmen des Projekts der ein auf einem UAS integrierbaren Demonstrationssystems zur Windfeldbestimmung basierend auf etablierten Sensoren aufgebaut. Parallel dazu entwickeln wir eine Datenpipeline zur Ableitung hochauflösender Windfelder aus bordseitigen Windmessungen von UAS und aus grob aufgelösten Vorhersagen regionaler Wettermodelle um die Daten in Relation zu setzen. Schließlich erfolgt eine Demonstration des Systems zur Windfeld-Messung auf einer repräsentativen Flugstrecke anhand dessen die Darstellung des Einsparpotentials im Energieverbrauch des autonomen UAS erfolgt.
Laufzeit: 2024 - 2027
Projektträger: EU
Ansprechpartner: Felix Biertümpfel
REDECORATE schlägt CubeSat-Schwärme als kosteneffiziente Möglichkeit zur Bekämpfung von Weltraummüll vor. Das Projekt entwickelt ein Konzept zur Entfernung von Weltraummüll und zur Wiederinbetriebnahme ausgemusterter Satelliten. Das Konzept kombiniert innovative Regelungs- und Flugführungsansätze mit einem CubeSat-Schwarm, der neuartige Elektrospray-Triebwerke (engl, ionic electro spray engines (iESE)) einsetzt.
Prinzipiell kann ein CubeSat-Schwarm ein Rendezvous mit Weltraumschrott durchführen und anschließend dessen Rotationsenergie z.B. mit Hilfe seiner Reaktionsräder abbauen (engl. detumble). Die Haupttriebwerke der CubeSats senken dann die Umlaufbahn des Trümmerteils ab, so dass das System in der Erdatmosphäre verglüht. Eine solche Mission ist äußerst anspruchsvoll und erfordert eine komplexe Steuerung und Kontrolle des CubeSat-Schwarms, zuverlässige Hardware und einen effektiven Antrieb - eine Kombination, die in dieser Form nicht existiert. REDECORATE adressiert drei Hauptprobleme einer solchen Mission.
Erstens werden iESE-Triebwerke als ein Konzept vorgeschlagen, um die Grenzen heutiger CubeSat-Antriebe und Lageregelungssysteme zu überwinden. Elektrospray-Triebwerke sind passiv angetrieben, kompakt, treibstoffsparend und können sowohl für den Hauptantrieb als auch für die Lage- und Positionskontrolle eines CubeSats eingesetzt werden. Aufgrund ihrer Kompaktheit können mehrere iESE-Stufen auf einem CubeSat installiert und dann nacheinander verwendet werden. Durch die Staffelung können längere Missionen, eine höhere Zuverlässigkeit und eine höhere Schubkraft als mit einem Standard-CubeSat-Antrieb erreicht werden. Darüber hinaus sind die iESEs-Antriebe voll regelbar und erzeugen keine Mikrovibrationen. Der Einsatz von Elektrospray-Triebwerken zur Lage- und Positionskontrolle eines CubeSats ermöglicht somit ein neues Leistungsniveau. Wenn die CubeSats in korrekt auf einem ausgedienten Satelliten montiert werden, kann die koordinierte Aktivierung der iESEs als neues Kontrollsystem für das Detumbling (Vermeidung von unzuverlässigen Reaktionsrädern) und das Deorbiting dienen. Aufgrund ihrer langen Lebensdauer kann der CubeSat-Schwarm auch dazu verwendet werden, den Satelliten wieder in Betrieb zu nehmen, wenn z.B. ein Fehler im Flugsteuerungssystem des Satelliten zu einem vorzeitigen Ende der Mission geführt hat. Zweitens wird ein sicheres hierarchisches Regelungssystem entwickelt, das den hohen Zuverlässigkeitsanforderungen in der Raumfahrt gerecht wird und gleichzeitig ein Höchstmaß an Leistungsfähigkeit garantiert. Es verwendet eine Planer-Tracker-Feedback-Anordnung und deckt alle Missionssegmente ab. Drittens werden sogenannte Integral Quadratic Constraints (IQCs) verwendet, um die Robustheit gegenüber Modellunsicherheiten und Totzeiten (z.B. Kommunikationsverzögerungen innerhalb des Schwarms) des Schwarms zu erhöhen. Die Implementierbarkeit und Anwendbarkeit der entwickelten Regelungsalgorithmen wird durch IQC-basierte und probabilistische Robustheitsanalysen an einem digitalen Zwilling des iESE-CubeSat-Schwarms und Mikroregler-in-the-Loop validiert.
Laufzeit: 2024-2027
Projektträger: ESA
Ansprechpartner: Carl-Johann Winkler
Planungs- und Steuerungsprobleme werden aufgrund der zunehmenden Komplexität moderner Raumfahrtmissionen (z. B. wiederverwendbare Trägerraketen und himmlische Sprungsysteme) immer anspruchsvoller. Die klassischen modellbasierten Regelungsmethoden erreichen einen Punkt, an dem sie die Leistungsanforderungen für solch komplexe Systeme nicht mehr erfüllen können, was die Sicherheit und den Erfolg der Missionen beeinträchtigt. Um die Einfachheit auf Systemebene ohne Leistungseinbußen beizubehalten, müssen Führungs-, Navigations- und Regelungssysteme (GNC) vielseitiger sein und sich an die zahlreichen Aufgaben und Systemkonfigurationen anpassen lassen.
Anpassungsfähigkeit und damit verbesserte Sicherheit können durch Online-Optimierung erreicht werden. Mit modellfreien/lernbasierten Ansätzen entfällt die Notwendigkeit komplexer, aufgabenspezifischer Modelle mit hoher Wiedergabetreue, so dass die Systeme vielseitiger für verschiedene Anwendungsfälle einsetzbar sind. Dieses Projekt konzentriert sich auf die Anwendung eines modellfreien Online-Optimierungs-Regelungs-algorithmus (z. B. Lernen) auf Landungsszenarien für Raumfahrzeuge. Um die Robustheit der resultierenden Regler zu gewährleisten, wird der Algorithmus eine wahrnehmungsbasierte Steuerung verwenden, um die Systemzustände aus Live-Bilddaten zu lernen und anschließend die Reglergewinne mit bestimmten Robustheits- und Leistungsgrenzen zu optimieren.
Um die modellfreien, bildbasierten GNC-Ansätze online in einer realistischen Umgebung zu testen, werden sie auf einem Multikopter-Teststand implementiert. Der Multikopter kann verschiedene Raumfahrtsysteme in unterschiedlichen Umgebungen genau simulieren. Modular abnehmbare flexible Pendel, Tanks und Massen berücksichtigen unterschiedliche Dynamiken (Schwappen, Flexibilität, Instabilität usw.). Die direkte Schubsteuerung simuliert verschiedene Gravitationsfelder sowie die Schubvektorsteuerung des Fahrzeugs. Und modulare Sensoren liefern den visuellen Input für die GNC-Algorithmen. Insgesamt werden die Arbeiten wertvolle Einblicke in die Verwendung modellfreier Ansätze für autonome Raumfahrtsysteme liefern, die an einem Demonstrator simuliert werden, der vielseitiger ist als die für die NASA entwickelten Systeme.
Laufzeit: 2023-2027
Projekttraeger: EIC
Ansprechpartner: Harald Pfifer
Dieses Projekt zielt darauf ab, ionische luftatmende Antriebssysteme über das Pionierstadium hinaus zu bringen, ihre Möglichkeiten zu erforschen und ihre Leistung zu verbessern. Nicht-thermische Plasmen für atmosphärische Antriebe sind Gegenstand neuerer Untersuchungen: Modellflugzeuge und Senkrechtstarter sind kürzlich mit dieser Art von Antrieb geflogen, aber das Potenzial dieser Technologie ist viel größer. Viele offene Aspekte in diesem Bereich verdienen es, untersucht zu werden, von der Grundlagenforschung zur Ionenproduktion bis zur geometrischen Optimierung der Elektroden und der Integration von Antriebssystemen in bestehende Flugzeuge.
Laufzeit: 2023-2026
Projekttraeger: ESA
Ansprechpartner: Emily Burgin
Künftige Raumfahrtmissionen werden mit der Einführung von Mondtoren und bemannten Marslandungen immer anspruchsvoller. Aufgrund der zunehmenden Systemkomplexität und des Bedarfs an Autonomie reichen die klassischen Methoden für Navigation, Lenkung und Kontrolle für einen sicheren Betrieb nicht aus. Außerdem haben Raumfahrzeuge nicht mehr nur eine einzige Konfiguration. Sie interagieren miteinander, ändern während ihrer Missionen mehrfach ihre Konfiguration und weisen aufgrund von Treibstoffverbrennung und wechselnden Umweltbedingungen eine unterschiedliche Dynamik auf.
Das Projekt entwickelt eine durch künstliche Intelligenz (KI) verbesserte Methode zur Systemidentifizierung in Echtzeit und zur Erzeugung von LFT. Dazu werden neuartige Online-Identifikationsverfahren eingesetzt, um Unsicherheiten zu quantifizieren. Durch KI wird der Systemidentifizierungsprozess mit einer LFT-Generierung niedriger Ordnung gekoppelt, die Unsicherheiten und variierende Dynamik berücksichtigt. Anschließend wird das Regelgesetz in Echtzeit auf der Grundlage der aktuellen Systemdynamik und -konfiguration aktualisiert. Die Anwendbarkeit wird anhand eines schnell rekonfigurierbaren Systems gezeigt. Die Arbeit bietet somit einen ganzheitlichen, durch KI verbesserten Rahmen für Identifikation, Modellierung und Synthese.
Laufzeit: 2022-2025
Projektträger: DLR
Ansprechpartner: Frederik Thiele
Das primäre Ziel des Projektes „ARCTIS“ ist die Formänderung von Rotorblättern mittels eines Wölbungs-Mechanismus zur aktiven Regelung um eine Reduzierung der Lärmentwicklung und somit eine Verbesserung der Rotoreffizienz und Verminderung der Umweltbelastungen zu realisieren. Eine hochgenaue Abbildung der Dynamik von Rotorblättern mit Wölbungs-Mechanismus und dessen Einfluss auf die Lärmabstrahlung bildet die theoretische Grundlage für die Ableitung von aeroakustischen Modellen. Mittels moderner Methoden der periodischen Regelung sollen Regelgesetze für die morphende Hinterkante zur Lärmminderung ausgelegt werden. Für die Anwendung bei Prototypen werden geeignete Sensoren untersucht, um eine Messung der notwendigen Eingangsgrößen während eines Fluges zu ermöglichen und so die Umsetzbarkeit der Forschung zu garantieren.
Vergangene:
Laufzeit: 2022-2024
Projekttraeger: ESA
Ansprechpartner: Emily Burgin
Im Laufe ihrer Betriebsdauer erfahren Raumfahrzeuge Veränderungen auf verschiedenen Ebenen, die erhebliche Auswirkungen auf das Lage- und Orbitregelsystem (AOCS) haben. Beispiele hierfür sind die Entfaltung und Rotationsbewegung von Anhängen wie Solaranlagen oder Instrumenten (z. B. das Scatterometer von MetOp-SG), die sich direkt auf das dynamische Verhalten auswirken, indem sie die Masseeigenschaften und Strukturmodenfrequenzen des Raumfahrzeugs verändern. Lösungen nach dem Stand der Technik, die sich auf robuste lineare zeitinvariante Verfahren stützen, können diese technischen Herausforderungen lösen, wenn auch mit suboptimaler Leistung und möglicherweise unnötigen Entwurfsiterationen. Eine attraktive Option zur Verbesserung ist der Einsatz linearer parametervariabler Verfahren (LPV). Ziel des Projekts ist es, die Anwendbarkeit von LPV- und adaptiven Regelungstechniken auf reale Raumfahrzeug-Lageregelungsprobleme zu demonstrieren und zu bewerten, wo die fortschrittlichen Techniken die bestehenden Lösungen in Bezug auf die technische Leistung und den Entwicklungsaufwand verbessern.
Laufzeit: 2023-2024
Projekttraeger: ESA
Ansprechpartner: Carl Winkler
Die New-Space-Entwicklungen mit dem Aufkommen von Microlaunchern stehen vor neuen Herausforderungen, um gegenüber den Mitfahrangeboten größerer Trägersysteme wettbewerbsfähig zu sein. Eine mehrmonatige Missionskonfigurationskampagne, bei der der GNC einer der Hauptfaktoren ist, wird den Anforderungen nicht gerecht. Daher ist eine Abkehr vom klassischen Ansatz des GNC-Entwurfs und -V&V unumgänglich, um die Zeit und die wiederkehrenden Kosten für jede Mission zu reduzieren. Robuste Regelung bietet großartige Möglichkeiten, um Regelsysteme schneller und zuverlässiger zu entwerfen und zu validieren, erfordern jedoch die richtigen Werkzeuge und/oder Expertenwissen. Das Hauptziel des Projekts ist die Entwicklung eines Control Design Frameworks als Grundlage für die Entwicklung und Validierung robuster Regler, die den Weg für die Industrialisierung auf dem New-Space-Markt ebnen.
Laufzeit: 2022-2024
Projekttraeger: DLR
Ansprechpartner: Hannes Rienecker
Das Hauptanliegen des Projekts URBANSens ist es, Flugrouten im urbanen Raum den Wetterbedingungen angepasst, auf Energieeffizienz zu optimieren. Insbesondere die Windverhältnisse entlang der Flugroute haben erheblichen Einfluss auf den Energieaufwand. Um noch detailliertere Daten zu erhalten, sollen Sensoren an den Luftfahrzeugen die Wind- und Wetterbedingungen sowohl vorausschauend als auch um
das Fluggerät herum erfassen. Diese Wetterinformationen werden dann mit den anderen Luftfahrzeugen geteilt, so dass durch die Vernetzung und die Analyse der Daten ein umfassendes Bild der Windverhältnisse entsteht. Als Beispielanwendung soll ein Lieferlogistiksystem entwickelt werden, welches auf vernetzten und mit neuartiger Messtechnik ausgestatteten unbemannten Flugsystemen (UAS) aufsetzt. Aufgrund ihrer geringen Größe und ihres Gewichts werden UAS stark durch die lokale Umweltaerodynamik im Stadtgebiet beeinflusst.
Laufzeit: 2023
Projekttraeger: ESA
Ansprechpartner: Harald Pfifer
Der Kostendruck auf die Raumfahrindustrie nimmt stetig zu, obwohl die Komplexität der Satellitensysteme immer weiter steigt. Dies birgt die Gefahr einer Kostenexplosion bei künftigen Missionen, wenn nicht rechtzeitig gegengesteuert wird. Die hier vorgeschlagene Studie ist ein wesentlicher Schritt, um diesem riskanten Trend entgegenzuwirken, indem die industrielle Effizienz gesteigert wird. Die Verifizierungs- und Validierungsaktivitäten (V&V) machen etwa 30-60% der Gesamtkosten des Attitude and Orbit Control Systems (AOCS) aus. Dieser hohe Anteil rechtfertigt, dass "V&V" der Schwerpunkt dieser Studie ist. Die Studie zielt darauf ab, die Lücke zwischen der in den Forschungsinstituten verfügbaren V&V-Technologie Forschungsinstituten und der in der Industrie etablierten V&V-Technologie Industrie zu reduzieren.
Laufzeit: 2021-2023
Projekttraeger: Industrieforschung gefoerdert von Voith Hydro
Ansprechpartner: David Noelle
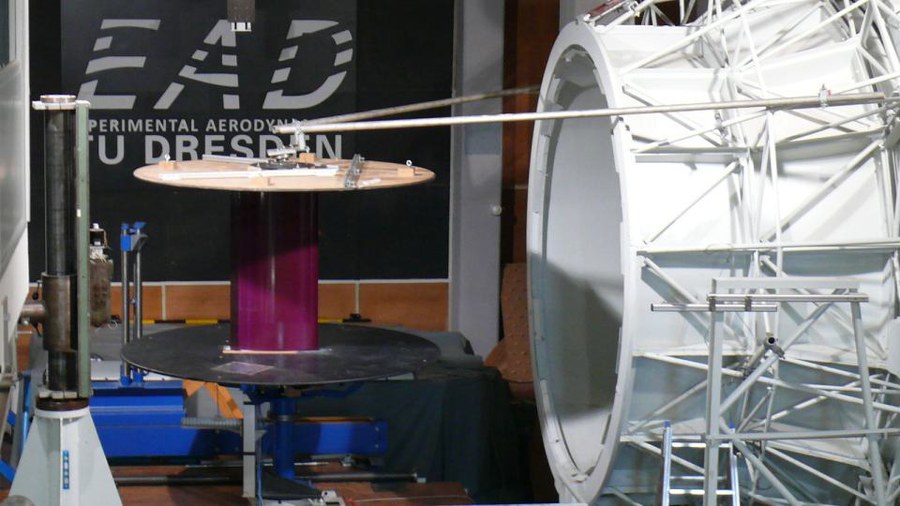
Die Auslegung des Luftkreislaufs zur Kühlung von Wasserkraftgeneratoren erfolgt weitgehend mittels CFD- Simulationen und Netzwerk-Berechnungen. Für innovative Designs, welche teils stark von den bisher etablierten abweichen, sind jedoch weiterhin direkte Messungen der Druckverlust-Charakteristiken zur Validierung der Berechnungen erforderlich. Dazu werden skalierte Modelle der originalen Maschinen verwendet.
Die Skalierung der Generatoren ins Modell erfolgt nicht einfach unter Anwendung einer maßstäblichen Verkleinerung, sondern nach Prinzipen strömungsmechanischer Ähnlichkeit sowie nach Erfahrungswerten. Daraus folgen durchaus unterschiedliche Skalierungs-Faktoren für einzelne Elemente der Geometrie und in den Raumrichtungen. Dabei kann stets nur partielle Ähnlichkeit erreicht werden, weshalb die angewendeten Ansätze in jedem Fall Kompromisse zwischen verschiedenen Kriterien darstellen. Als verlässliche Richtlinie bzw. zur Überprüfung der gewählten Skalierungsansätze fehlt es an Fachliteratur. Auch ist die Menge an Veröffentlichungen auf diesem Gebiet sehr begrenzt.
Ziel dieses Projektes ist daher die Schaffung einer breiten Datenbasis und darauf aufbauend die Erabeitung von Richtlinien zur Skalierung der Modelle von Wasserkraftgeneratoren. Dazu werden grundlegende theoretische, numerische und experimentelle Betrachtungen durchgeführt.
Laufzeit: 2021-2023
Projekttraeger: ESA
Ansprechpartner: Felix Biertuempfel
Zukünftiger Weltraummissionen werden immer komplexer und die involvierten Systeme zunehmend autonomer. Unweigerlich stoßen klassische Planungs-, Bahnführungs- und Regelungsmethoden hier an ihre Grenzen – onboard, online optimierte Navigation und Regelung lauten die Zauberwörter. Diese benötigen fortschrittliche Validierungs- und Verifikation (V&V)-Tools. Um die Sicherheit und Erfolg künftiger Missionen zu sichern, entwickeln wir einen online Robustheitsmonitor für onboard Optimierungs-, Bahnplanungs- und Regelungsalgorithmen wie sie in modernsten Raumschiffen verwendet werden. Begleite uns auf dem spannenden Weg von der Grundlagenforschung bis hin zum ersten Testflug auf ADAMP, dem ESA Demonstrator für planetare Landungen.
Vordergründiger Zweck des Projektes ist Strukturintegration von Rohholmen im Flügel, die gleichzeitig als Drucktanks für Wasserstoff zum Betrieb von Brennstoffzellen dienen sollen.
Im Rahmen der Entwicklung eines flugfähigen Prototypen für ein viersitziges Reiseflugzeug leistet EAD Unterstützung bei der aerodynamischen Auslegung, speziell der Optimierung eines Flügelprofils. Es gilt dabei, Forderungen nach möglichst niedrigem Widerstand im Reiseflug, ausreichendem Maximalauftrieb und günstigen Platzverhältnissen zur Unterbringung der Tankröhren in Einklang zu bringen.

Prinzipdarstellung von Drucktanks im Flügel; Auswirkung einer besonders geräumigen Kontur auf die Druckverteilung
Aufgrund der allgemeinen Auslegung des Flugzeugs, insbesondere der Flächenbelastung, stellte sich heraus, dass die notwendige Mindestfluggeschwindigkeit und ein widerstandsarmer Betrieb im Reiseflug nicht mit einer starren Profilkontur zu vereinigen sind. Es viel daher die Wahl auf Spreizklappen als Hochauftriebshilfen.
Für diese endgültige Konfiguration wurde ein Flügelmodell gebaut und im Windkanal vermessen. Die Bestimmung der aerodynamischen Beiwerte für Auftrieb und Momente erfolgt aus der Druckverteilung, das Modell ist dafür mit 80 Druckmessstellen versehen. Der Widerstand wird aus dem Gesamtdruckverlust im Nachlauf ermittelt, dazu dient ein verfahrbarer Pitotrechen hinter dem Flügel. Die Betätigung der Klappe erfolgt motorisch, sie kann also unter Strömungslast verstellt werden, um auch Effekte beim Aufahren im Flug zu erfassen.
Flügelmodell für Profilvermessungen im Windkanal
Hydrotube ist ein im Luftfahrtforschungsprogramm LuFo-V verankertes und vom BMWi finanziertes Projekt.
Bodeneffekt
Start und Landung stellen die kritischsten Flugphasen in der Luftfahrt dar. Kurz vor dem Aufsetzen bzw. kurz nach dem Abheben wirkt außerdem der Boden auf die Flugzeugumströmung zurück und verändert so dessen aerodynamische Eigenschaften. Windkanalmessungen im Bodeneffekt sind deshalb fester Bestandteil bei der Entwicklung von Großflugzeugen. Bei solchen Versuchen werden ebenso wie im Fahrzeugbau mitlaufende Bänder zur korrekten Modellierung der Bodenrandbedingung verwendet.

Prinzipuntersuchungen mit einem stark angestellten Spaltflügel in Rückenlage zur Überprüfung des stabilen Bandlaufes unter Saugspitzen mit einem touchierenden Laserstrahl
Im Rahmen von M-Fly/Aeronext geförderte umfangreiche Untersuchungen zu Bodeneffektmessungen an Transportflugzeugen dienen einer grundlegenden Klärung von Problemen, die im Versuchsbetrieb in größeren Kanälen wie dem DNW-LLF auftreten. Dazu zählen Unterdruckgebiete, die infolge der Interaktion von Klappenrandwirbeln und Propellerstrahlen auf dem Boden entstehen und zu einem Abheben des Gurtbandes führen können. Außerdem ist eine Überprüfung der Eignung moderner Elektromotoren aus dem Flugmodellbau für Windkanalmessungen Bestandteil des Projektes. Die Leitung starker, nicht völlig geglätteter Ströme an der Messwaage vorbei wirft Fragen bezüglich elektromagnetischer Verträglichkeit und Kabelsteifigkeit auf, die es zumindest auszuräumen gilt.
Die gewählte eher ungewöhnliche asymmetrische Modellkonfiguration erlaubt die Behandlung aller geforderten Aufgaben bei einem günstigen Modellmaßstab. Die Halterung durch den Flügelstummel ermöglicht zudem den Verzicht auf Anbauten am Rumpf, die so in der Realität nicht vorhanden sind und z.B. das Seitenleitwerk abschatten. Für die Messungen ist eine spezielle Fünfkomponentenwaage angefertigt worden, deren Messwerke sich wie Kettenglieder umschlingen und die damit quer im Rumpf des Modells Platz findet.

TAMGIV
Im Ergebnis konnten u.a. das Auftreffen des Randwirbels auf das Band und ein auftriebsmindernder Rückstau vom Boden bis auf die innere Spaltklappe identifiziert werden.
Strömungsbeeinflussung an Hochauftriebskonfigurationen
Die Arbeiten zurAusftriebssteuerung durch Absaugung an der Flügelhinterkante mündeten in einem im Rahmen des Luftfahrtforschungsprogramms LuFo IV (M-Fly/Aetronext) geförderten Projekt, bei dem die Beeinflussung der Strömung auf dem transsonischen Profil DLR F-15 in Hochauftriebskonfiguration untersucht wird. Ziel ist es, die Wirkung eines als Wölbklappe absenkbaren Spoilers durch Ausblasung am Scharnier und Absaugung an der Hinterkante zu verbessern und in der Folge den Ausschlag der Spaltklappe vergrößern zu können, was im Endziel zu einer Steigerung des Gesamtauftriebs führt. Im Umkehrschluss soll es mit solchen Technologien möglich sein, auf komplizierte, schwere und geräuschintensive Mehrfachspaltklappen zu verzichten.
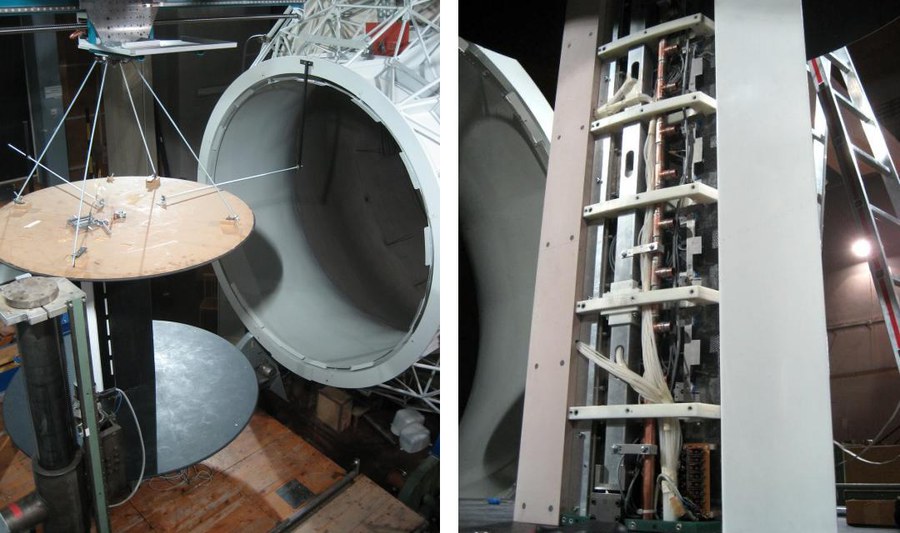
Ursprünglicher Aufbau senkrecht in der Messstrecke, Blick ins Modellinnere

Späterer, waagerechter Aufbau; Arrays mit paarweisen Heißfilmen zur Ablösungsdetektion auf der Klappe
Neben dem Nachweis der Möglichkeit der Auftriebssteigerung durch Absaugung auch an der Hinterkante des abgesenkten Spoilers wurde in einer letzten Projektphase in Zusammenarbeit mit Partnern aus Ottobrunn die Möglichkeit untersucht, einsetzende Ablösungen auf der Klappe anhand von paarweise angeordneten Heißfilmen zu detektieren, da diese den Richtungssinn der wandnahen Strömung erkennen können sollten.
„Skalenübergreifende Modellierung in der Strömungsmechanik und Meteorologie“
Anwendungsbereich : Große Skalen der Turbulenz
Forschungsvorhaben:
„Turbulente Austauschprozesse zwischen Waldflächen und der Atmosphäre“
In Landschaften stellen Wälder in thermischer und dynamischer Hinsicht die wichtigsten Inhomogenitäten dar. Ihre vertikale Ausdehnung und ihre komplexe Struktur führt zu zahlreichen Effekten, die bis heute noch völlig unzureichend beschrieben werden können, z.B. Rezirkulationen mit elastischen Rauigkeitselementen, zeitlicher Wechsel zwischen ge- und entkoppelten Bestandsräumen oder transienten, internen Grenzschichten ohne vollständige Anpassung an die Unterlage. Diesem Manko soll durch eine Kombination von Strömungsexperimenten und Modellsimulationen abgeholfen werden. Dabei arbeiten die beiden beteiligten Institute der TU Dresden sowohl experimentell als auch numerisch eng zusammen und stimmen ihre Vorgehensweisen hinsichtlich der jeweiligen dynamischen Randbedingungen so ab, dass in jedem Teilprojekt die meteorologischen und strömungsmechanischen Belange vertreten sind. Von besonderer Bedeutung in den beiden Teilprojekten ist der anwendungsorientierte Aspekt der Ausbreitung von Spurenstoffen, also CO2 sowie Schadstoffen, im Bereich des Waldes und seinen Rändern.

Poster zum DFG-Schwerpunktprogramm 1276, Teilprojekt C4
„Bildgebende Messverfahren für die Strömungsanalyse“
Thema:
„3-D PTV zur quantitativen Bestimmung Lagrange’scher Partikeltrajektorien in Gasströmungen"
3-D PTV (particle tracking velocimetry) ist ein photogrammetrisches Messverfahren der Strömungsanalyse, welches es erlaubt, für eine große Anzahl von unregelmäßig über ein dreidimensionales Beobachtungsvolumen verteilten Partikeln alle drei Komponenten des Geschwindigkeitsvektors zu bestimmen. Zusätzlich ist 3-D PTV in der Lage, Partikel über längere Zeit zu verfolgen und damit dreidimensionale Trajektorien als Voraussetzung für eine Lagrange'sche Betrachtung zu generieren.

Berechnete Partikelbahnen
Das Verfahren wurde bislang ausschließlich für die Analyse von Phänomenen in Flüssigkeiten eingesetzt. Im Rahmen des Forschungsvorhabens soll ein Verfahren entwickelt werden, das erstmals die Bestimmung von 3-D Trajektorien in Gasströmungen ermöglicht. Dazu wird eine digitale Hochgeschwindigkeitskamera mittels eines Prismenvorsatzes zu einem Aufnahmesystem erweitert, welches mit hoher zeitlicher Auflösung stereoskopische Bildsequenzen von durch geeignete Partikel visualisierten Strömungen aufnimmt. In diesen Bildsequenzen werden durch Methoden der digitalen Bildverarbeitung Partikel detektiert, aus denen durch Herstellung der spatio-temporalen Korrespondenzen dreidimensionale Trajektorien bestimmt werden.

Optischer Aufbau mit Strahlteiler
Das System wird zur quantitativen Untersuchung von Ablösungserscheinungen hinter stumpfen Körpern im Windkanal angewandt. Damit können auch instationäre Vorgänge dreidimensional mit hoher räumlicher und zeitlicher Auflösung analysiert und mit numerischen Simulationen sowie Resultaten anderer Messverfahren verglichen und grundlegende Erkenntnisse über die Bildung von Wirbelstrukturen bei umströmten Körpern erhalten werden.

Vergleichsmessungen zur mittleren Geschwindigkeit der Zylinderumströmung mit Hitzdraht
Vergleichsmessungen zur mittleren Strömungsgeschwindigkeit mit Hitzdraht
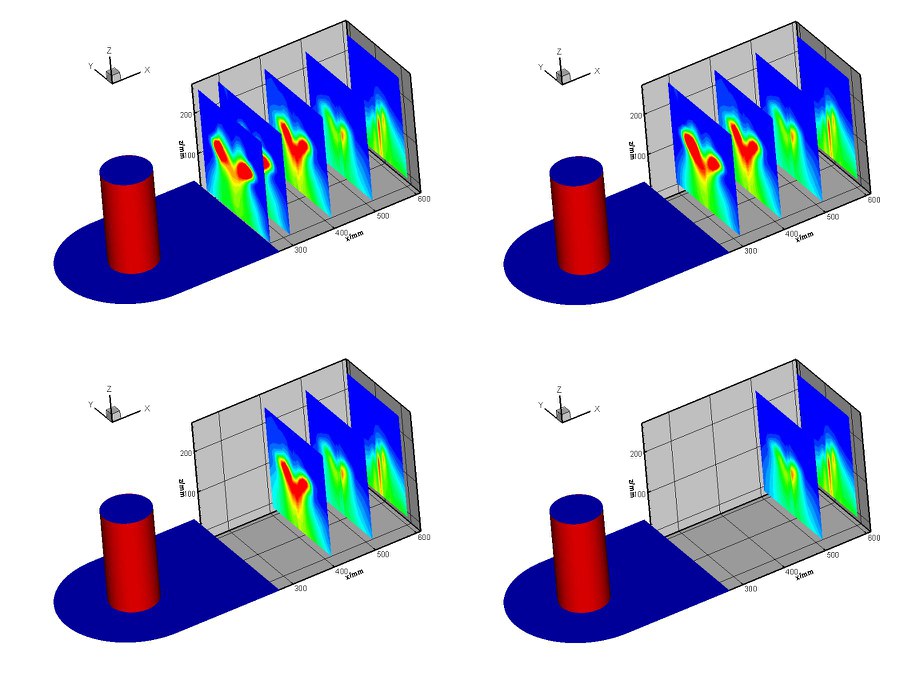
Vergleichsmessungen zur Aufenthaltswahrscheinlichkeit der Partikel anhand der Ausbreitung einer CH4-Fahne.