3D Particle Tracking Velocimetry
Project title
Determination of three-dimensional flow velocity fields in a wind tunnel using a multi-ocular high-speed camera
Funding
Deutsche Forschungsgemeinschaft (DFG, SPP-1147)
Goal
3D-PTV (particle tracking velocimetry) is a photogrammetric method for the determination and analysis of 3D trajectories in flows. This is signalled by a large number of tracer particles in a 3D observation volume.
In recent years, this method has only been used in fluids. For this project, 3D PTV is to be extended to velocity fields in gas flows. In cooperation of the IPF with the Institute of Aeronautics and Astronautics of the TU Dresden such a measurement method will be developed. The multi-ocular image sequences will be recorded with a high-speed camera FASTCAM ultima 1024 and a prism system. The measurements can be carried out in a suction channel with a measuring cross-section of about 50 x 50 cm2 or in a wind tunnel of Göttingen design with a diameter of 3 m.
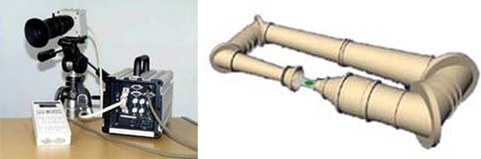
Fastcam Ultima high speed camera (left) and low speed wind channel (right)
Principle of 3D-PTV
The 3D-PTV is a flexible technique for determining time-resolved, spatial velocity fields. These are visualised by suitable particles. By recording and evaluating a sequence of images, particle trajectories can be reconstructed. A relatively long observation period makes it possible to obtain information about fluctuation variables in unsteady flows.
To determine the 3D coordinates of all particles at all epochs, a multi-image evaluation must be carried out. Several synchronised cameras or one camera with a beam splitter can be used for this purpose. To obtain a comprehensive description of the velocity field, many particles are introduced into the existing flow. In order to be able to solve the ambiguities during the spatial assignment, a stereo recording system is no longer sufficient at a high particle density. The extension to a 3- or 4-camera system can solve ambiguities during image assignment, thus increasing reliability (MAAS 1992).
The success of spatio-temporal mapping depends on the complexity of the flow, the number of particles and the frame rate of the camera compared to the flow velocity. The mapping can be carried out on the one hand in all images as a 2D tracking and on the other hand in the object space as a 3D tracking. In this way, ambiguities can be resolved and reliability increased.
The flow velocities and the volumes flowed through are not decisive for the accuracy to be achieved. Likewise, the method is not bound to a specific medium. It can be implemented in both liquids and gases. The basic evaluation algorithm can be adapted for different applications. However, the hardware components used are of great importance. The limiting factors for the flow velocity to be determined are the frame rate and the light sensitivity of the camera in combination with the available lighting.
Hardware and measurement configuration
The configuration of the recording system is strongly dependent on the model on which the flow is to be determined. On the one hand, the best possible geometric configuration must be ensured, on the other hand, occlusions by the object to be measured must be avoided. An important point is the arrangement of the light sources. The camera must not be influenced by stray light and direct light.
Mirror system
A multi-camera system is necessary for the task at hand. The usual use of multiple cameras has decisive economic and technical disadvantages when recording gas flows, which usually require the use of high-speed cameras due to their speed spectrum. On the one hand, the acquisition of several high-speed cameras is very cost-intensive. Secondly, several cameras have to be synchronised, which is not possible with all high-speed cameras.
An alternative to using several cameras is to use a single camera with the aid of a beam splitter. In this case, several cameras are simulated by splitting and redirecting the beam path of one camera directly in front of the lens. The disadvantages of synchronisation mentioned above are completely eliminated. Likewise, the acquisition costs for a prism mirror system are lower than for additional cameras. One disadvantage of this method, however, is that several partial images are imaged on one sensor.
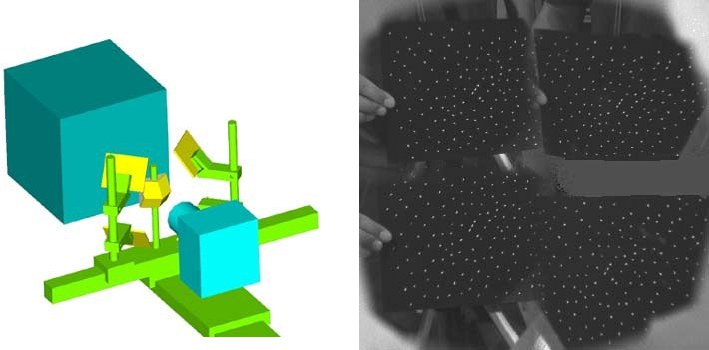
Beam splitting system (left) and resulting image (right)
Camera
In addition to the sensor format of the camera, the temporal resolution is also of particular importance when determining velocity fields. The frame rate of the camera has a decisive influence on the success of tracking. The smaller the time interval between two images, the smaller the displacements in the image and in the object space. Furthermore, the frame rate, the size of the observation window and the flow velocity determine the number of images in which a particle is imaged. The movements of the objects to be imaged create a motion blur. The moving, round particles are imaged as streaks, the length of which depends on the speed and the exposure time.
The high-speed camera currently used is a FASTCAM ultima 1024, which can take pictures at 500 Hz and 1000 x 1000 pixels or 1000 Hz and 500 x 500 pixels. The accuracy of this CMOS camera is comparable to good industrial cameras.
Processing of imagery
Image processing and image analysis
The captured image sequences are processed in several steps to obtain the image coordinates of all particles as a result. The background image is extracted from the entire image sequence by a pixel-by-pixel temporal histogram analysis and subtracted from the raw image data. In these, a segmentation is performed by a region growing procedure. A centroid method is used to determine the grey value weighted centre point. It can be shown that the centre of gravity of the image of an object with motion blur corresponds to the average position over the exposure time. Thus, small motion blurs do not affect the image coordinates. These motion blurs even contain information about the direction of motion and the speed of the individual particles.

Original image, background and difference image
Calculation of the object coordinates of the particles
From the image coordinates of all particles in all images obtained by image processing, the object coordinates of the individual particles are calculated by spatial forward sectioning. A large number of particles are recorded per image. In order to still be able to perform an unambiguous assignment, the core lines of the multi-camera system are used. As a result of this calculation, coordinate data sets are stored that contain the object coordinates and the image coordinates of all images for each particle per epoch. This results in the information of the homologous image points for each epoch.
Tracking
The linking of the individual particles between the individual epochs results in a path for each individual tracer and thus, in its entirety, an overview of the flow. The basis for this is the coordinate database with the links between image and object coordinates.
The spatio-temporal assignment can be carried out in both image and object space. The concatenation of the individual pieces of information is carried out iteratively, whereby either the image or the object space represents the reference and the respective other information supports the decision-making. The approximate solution for the mapping is determined by the prediction of the trajectory. If enough previous epochs are available, the subsequent location can be extrapolated by acceleration, velocity, calculated from the previous epochs, and the current location. A data failure of only one epoch leads to the fact that no extrapolation can be carried out in the first solution step. In this case, a mean flow field, determined by derived sizes of the streaks and mean values of the neighbourhood, is the only way to find the approximate solution for the mapping. The decision according to the correct mapping is supported by many conditions. Through spatio-temporal mapping, it is possible to iteratively detect mismatches. An assignment is carried out for each image space and the object space. The correct assignment is given if consistent data are found for each particle and two consecutive epochs. Conversely, for a correct assignment in an image space or the object space, one finds the further concatenations in the database.
In the chosen approach in the 3D-PTV data processing chain, particle tracking in 2D image space plays a minor role. A simple approach is implemented for this purpose. The tracking algorithm used in 2D image space uses simple global approximations for the mapping. The prediction is performed with a linear function. This evaluation results in a few possible candidates for a possible temporal mapping. As a basis for finding a correspondence through spatio-temporal matching, the determination of a few possible candidates is sufficient.

Result of 2D tracking
Publications
Partner
- Prof. Dr.-Ing. Roger Grundmann, Institute of Aerospace Engineering
Contact
- Prof. Dr. habil. Hans-Gerd Maas (Lead)
- Dipl.-Ing. Torsten Putze, Dipl.-Ing. Patrick Westfeld (Project work)