3D Particle Tracking Velocimetry
Titel des Projekts
Bestimmung dreidimensionaler Strömungsgeschwindigkeitsfelder im Windkanal mittels einer multi-okularen Hochgeschwindigkeitskamera
Förderung
Deutsche Forschungsgemeinschaft (DFG, SPP-1147)
Ziel des Projekts
3D-PTV (particle tracking velocimetry) ist eine photogrammetrische Methode zur Bestimmung und Analyse von 3D Trajektorien in Strömungen. Diese wird durch eine Vielzahl von Tracer-Partikeln in einem 3D Beobachtungsvolumen signalisiert.
In den letzten Jahren wurde dieses Verfahren nur in Flüssigkeiten angewandt. Für dieses Projekt sollen das 3D PTV auf Geschwindigkeitsfelder in Gasströmungen erweitert werden. In Zusammenarbeit des IPF mit dem Institut für Luft- und Raumfahrt der TU Dresden wird ein solches Messverfahren entwickelt. Die multiokularen Bildsequenzen werden mit einer Hochgeschwindigkeitskamera FASTCAM ultima 1024 und einem Prismensystem aufgenommen. Die Messungen können in einem Saugkanal mit etwa 50 x 50 cm2 Messquerschnitt oder in einem Windkanal Göttinger Bauart mit einem Durchmesser von 3 m durchgeführt werden.
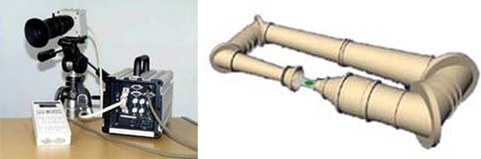
Fastcam Ultima high speed camera (li) und Niedergeschwindigkeitswindkanal (re.)
Prinzip des 3D-PTV
Das 3D-PTV ist eine flexible Technik zur Bestimmung von zeitaufgelösten, räumlichen Geschwindigkeitsfeldern. Diese werden durch geeignete Partikel visualisiert. Durch die Aufnahme und Auswertung einer Bildsequenz können Partikelbahnen rekonstruiert werden. Eine relativ lange Beobachtungsdauer ermöglicht es, Informationen über Schwankungsgrößen in instationären Strömungen zu erhalten.
Zur Bestimmung der 3D-Koordinaten aller Partikel zu allen Epochen muss eine Mehrbildauswertung durchgeführt werden. Hierzu können mehrere synchronisierte Kameras oder eine Kamera mit Strahlenteiler genutzt werden. Um eine umfassende Beschreibung des Geschwindigkeitsfeldes zu erhalten, werden viele Partikel in die vorhandene Strömung eingeführt. Um während der räumlichen Zuordnung die Mehrdeutigkeiten lösen zu können, reicht bei einer hohen Teilchendichte ein Stereoaufnahmesystem nicht mehr aus. Die Erweiterung auf ein 3- oder 4-Kamerasystem kann Mehrdeutigkeiten bei der Bildzuordnung lösen, und damit die Zuverlässigkeit steigern (MAAS 1992).
Der Erfolg der spatio-temporalen Zuordnung ist von der Komplexität der Strömung, der Anzahl der Partikel und der Bildrate der Kamera im Vergleich zur Strömungsgeschwindigkeit abhängig. Die Zuordnung kann zum einen in allen Bildern als ein 2D-Tracking und zum anderen im Objektraum als ein 3D-Tracking durchgeführt werden. Somit können Mehrdeutigkeiten gelöst und die Zuverlässigkeit erhöht werden.
Die Strömungsgeschwindigkeiten und die durchströmten Volumina sind nicht ausschlaggebend für die zu erreichende Genauigkeit. Ebenso ist das Verfahren nicht an ein bestimmtes Medium gebunden. Es lässt sich sowohl in Flüssigkeiten als auch Gasen realisieren. Der grundlegende Auswertealgorithmus kann für verschiedene Anwendungen adaptiert werden. Von großer Bedeutung sind jedoch die eingesetzten Hardwarebausteine. Die limitierenden Faktoren für die zu bestimmende Strömungsgeschwindigkeit sind die Bildrate und die Lichtempfindlichkeit der Kamera in Kombination mit der vorhandenen Beleuchtung.
Hardware und Aufbau der Messanordnung
Die Konfiguration des Aufnahmesystems ist stark abhängig vom Modell, an welchem die Strömung bestimmt werden soll. Auf der einen Seite ist für eine möglichst gute geometrische Konfiguration zu sorgen, auf der anderen Seite müssen Verdeckungen durch das zu messende Objekt vermieden werden. Ein wichtiger Punkt ist die Anordnung der Lichtquellen. Die Kamera darf nicht durch Streulicht und direktes Licht beeinflusst werden.
Spiegelsystem
Für die gestellte Aufgabe ist ein Mehrkamerasystem notwendig. Die übliche Nutzung von mehreren Kameras hat bei der Aufnahme von Gasströmungen, die auf Grund ihres Geschwindigkeitsspektrums meist die Verwendung von Hochgeschwindigkeitskameras erfordern, entscheidende wirtschaftliche und technische Nachteile. Zum einen ist die Anschaffung mehrerer Hochgeschwindigkeitskameras sehr kostenintensiv. Zum anderen müssen mehrere Kameras synchronisiert werden, was nicht bei allen Hochgeschwindigkeitskameras möglich ist.
Eine Alternative zur Verwendung mehrerer Kameras ist die Nutzung einer einzelnen Kamera unter zu Hilfenahme eines Strahlenteilers. Hierbei werden mehrere Kameras simuliert, indem der Strahlengang einer Kamera direkt vor dem Objektiv aufgeteilt und umgelenkt wird. Die oben angesprochenen Nachteile einer Synchronisation entfallen vollständig. Ebenso sind die Anschaffungskosten für ein Prismen-Spiegelsystem geringer als für zusätzliche Kameras. Ein Nachteil dieser Methode ist jedoch, dass auf einem Sensor mehrere Teilbilder abgebildet werden.
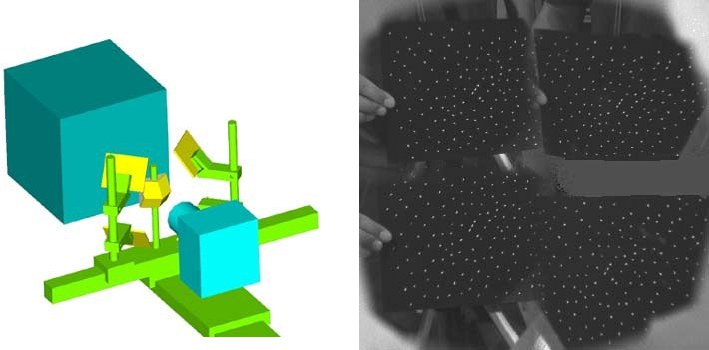
Strahlteilersystem (li.) und Kamerabild (re.)
Kamera
Neben dem Sensorformat der Kamera ist bei der Bestimmung von Geschwindigkeitsfeldern auch die zeitliche Auflösung von besonderer Bedeutung. Die Bildrate der Kamera hat entscheidenden Einfluss auf den Erfolg des Tracking. Je kleiner das Zeitintervall zwischen zwei Bildern ist, desto kleiner sind die Verschiebungen im Bild und im Objektraum. Weiterhin ergibt sich aus der Bildrate, der Größe des Beobachtungsfensters und der Strömungsgeschwindigkeit die Anzahl der Bilder, in denen ein Partikel abgebildet wird. Die Bewegungen der aufzunehmenden Objekte erzeugen eine Bewegungsunschärfe. Die sich bewegenden, runden Partikel werden als Streaks abgebildet, dessen Länge abhängig ist von der Geschwindigkeit und der Belichtungszeit.
Die zur Zeit verwendete Hochgeschwindigkeitskamera ist eine FASTCAM ultima 1024. Damit können Aufnahmen mit 500 Hz und 1000 x 1000 Pixel oder 1000Hz und 500 x 500 Pixel durchgeführt werden. Die Genauigkeit dieser CMOS - Kamera ist vergleichbar mit guten Industriekameras.
Auswertung des Bildmaterials
Bildverarbeitung und Bildanalyse
Die aufgenommenen Bildsequenzen werden in mehreren Schritten verarbeitet, um als Ergebnis die Bildkoordinaten aller Partikel zu erhalten. Aus der gesamten Bildsequenz wird durch eine pixelweise zeitliche Histogrammanalyse das Hintergrundbild extrahiert und von den rohen Bilddaten subtrahiert. In diesen wird durch ein Region Growing Verfahren eine Segmentierung durchgeführt. Über ein Schwerpunktverfahren wird der grauwertgewichtete Mittelpunkt bestimmt. Es kann gezeigt werden, dass der Schwerpunkt des Abbildes eines Objektes mit Bewegungsunschärfe der mittleren Position über die Belichtungszeit entspricht. Somit beeinflussen kleine Bewegungsunschärfen die Bildkoordinaten nicht. Diese Bewegungsunschärfen beinhalten sogar Informationen über die Bewegungsrichtung und die Geschwindigkeit der einzelnen Partikel.

Originalbild, Hintergrundbild und Differenzbild
Berechnung der Objektkoordinaten der Partikel
Aus den durch Bildverarbeitung gewonnenen Bildkoordinaten aller Partikel in allen Bildern werden durch räumlichen Vorwärtsschnitt die Objektkoordinaten der einzelnen Partikel berechnet. Es wird eine hohe Anzahl von Partikeln je Bild aufgenommen. Um dennoch eine eindeutige Zuordnung durchführen zu können, werden die Kernlinien des Mehrkamerasystems zu Hilfe genommen. Als Ergebnis dieser Berechnung werden Koordinatendatensätze gespeichert, die je Epoche zu jedem Partikel die Objektkoordinaten und die Bildkoordinaten aller Bilder beinhalten. Hieraus ergeben sich die Informationen der homologen Bildpunkte zu jeweils einer Epoche.
Tracking
Die Verknüpfung der einzelnen Partikel zwischen den einzelnen Epochen ergibt einen Pfad für jeden einzelnen Tracer und somit in der Gesamtheit einen Überblick über die Strömung. Grundlage hierfür ist die Koordinatendatenbank mit den Verknüpfungen von Bild- und Objektkoordinaten.
Die spatio-temporale Zuordnung kann sowohl im Bild- als auch im Objektraum durchgeführt werden. Die Verkettung der einzelnen Informationen wird iterativ durchgeführt, wobei entweder der Bild- oder der Objektraum die Referenz darstellt und die jeweilig anderen Informationen die Entscheidungsfindung unterstützen. Die Näherungslösung für die Zuordnung wird durch die Prädiktion der Bewegungsbahn bestimmt. Sind genügend Vorgängerepochen vorhanden, kann der Folgeort durch Beschleunigung, Geschwindigkeit, berechnet aus den Vorgängerepochen, und dem momentanen Ort extrapoliert werden. Ein Datenausfall von nur einen Epoche führt bei dem ersten Lösungsschritt dazu, dass keine Extrapolation durchgeführt werden kann. In diesem Fall ist ein mittleres Strömungsfeld, bestimmt durch abgeleitete Größen der Streaks und mittlere Werte der Nachbarschaft, die einzige Möglichkeit, die Näherungslösung für die Zuordnung zu finden. Die Entscheidung nach der richtigen Zuordnung wird durch viele Bedingungen gestützt. Durch die spatio-temporale Zuordnung ist es möglich, iterativ Fehlzuordnungen aufzudecken. Für jeden Bild- und den Objektraum wird eine Zuordnung durchgeführt. Die richtige Zuordnung ist dann gegeben, wenn sich für jedes Partikel und zwei aufeinander folgende Epochen konsistente Daten ergeben. Im Umkehrschluss findet man zu einer richtigen Zuordnung in einem Bild- oder dem Objektraum die weiteren Verkettungen in der Datenbank.
Bei der gewählten Vorgehensweise in der 3D-PTV Datenverarbeitungskette spielt die Partikelverfolgung im 2D-Bildraum eine untergeordnete Rolle. Hierfür ist ein einfacher Ansatz implementiert. Der genutzte Trackingalgorithmus im 2D-Bildraum nutzt einfache globale Näherungswerte für die Zuordnung. Die Prädiktion wird mit einer linearen Funktion durchgeführt. Anhand dieser Auswertung ergeben sich wenige mögliche Kandidaten, welche für eine mögliche zeitliche Zuordnung in Frage kommen. Als Grundlage für eine Korrespondenzfindung durch spatio-temporales Matching ist die Festlegung auf wenige mögliche Kandidaten ausreichend.

Ergebnis eines 2D-Tracking
Relevante Publikationen
Partner
- Prof. Dr.-Ing. Roger Grundmann, Institut für Luft- und Raumfahrttechnik
Kontakt
- Prof. Dr. habil. Hans-Gerd Maas (Leitung)
- Dipl.-Ing. Torsten Putze, Dipl.-Ing. Patrick Westfeld (Bearbeitung)