ADFEX - Adaptive föderative 3D-Exploration mit Multi-Roboter-Systemen
Inhaltsverzeichnis
Allgemein
Die Nachwuchsforschergruppe ADFEX − Adaptive föderative 3D-Exploration mit Multi-Roboter-Systemen − verfolgt das sehr ambitionierte Ziel, räumliche Informationen zu unbekannten großflächigen Umgebungen schnell und zuverlässig zu erfassen, zu verarbeiten und weiterzugeben.
Dreidimensionale räumliche Erkundungen sollen von einer Flotte aus mehreren Flugrobotern durchgeführt werden. Diese Flugroboter werden mit unterschiedlichen Sensoren wie Laserscanner, hochauflösende Kameras oder Wärmebildkameras ausgestattet und agieren teilautonom. Das bedeutet, sie werden über eine einfache Bedienkonsole koordiniert und gesteuert. Als Pilotanwendung ist das Erkennen von Bauschäden an schwer zugänglichen Objekten (wie etwa Brücken) vorgesehen. Durch den Einsatz derartiger kooperierender Multi-Roboter-Systeme können Raumerkundungen automatisiert, stark vereinfacht und in stark verbesserter Qualität durchgeführt werden. Genauere Informationen finden Sie in der detaillierteren Projektvorstellung.
ADFEX – Projektfilm
Veröffentlicht am 1. Januar 2016 © TUD
Im Rahmen des ESF-Projekts ADFEX entstand folgender Film: Gezeigt werden die Multicopter mitsamt der installierten Sensortechnik, verschiedene Befliegungssituationen und Flugmanöver sowie die Benutzer-Software und die virtuelle Rekonstruktion der Brücke “Sternstraße”. Youtube-Link: https://youtu.be/caNry-UOY-M
ADFEX Benutzersoftware
Veröffentlicht am 5. Mai 2015. © TUD
Das Video zeigt einige Funktionalitäten der Benutzersoftware. Sie kann sowohl während der Befliegung mit den Octocoptern zum Zwecke des Monitoring wie auch im Büro zur Planung und zur Postanalyse verwendet werden.
Bitte beachten Sie: Die gezeigten Programmausschnitte stellen die erste prototypische Umsetzung dar und spiegeln nicht die Qualität einer finalen Anwendung wider.
Youtube-Direktlink: https://youtu.be/z2m3EHeqclo
Englische Version: https://youtu.be/0Sdrg2UotDg
Flüge zur Datenakquise

Veröffentlicht am 30. März 2015.
Am 19.03.2015 wurde eine ganze Reihe von Flügen an der Sternstraßenbrücke durchgeführt. Neben der Befliegung der gesamten Brücke wurden insbesondere die schwer zugänglichen Schadstellen angeflogen, welche bei der Brückenprüfung im November 2014 identifiziert wurden. Hiermit ist eine vergleichende Einschätzung des aufgenommenen Bildmaterials gegenüber manuell getätigten Nahaufnahmen möglich. Bei den Flugexperimenten konnte die gesamte Sensorik ausführlich getestet und deren individuelle Eignung zur Erkennung von Schadstellen evaluiert werden. Die vom Laserscanner, der Infrarot- und der hochauflösenden Kamera gewonnen Daten wurden während des Fluges visualisiert und in der Nachbereitung zu einem detaillierten Brückenmodell integriert.
Brückenprüfungen mit Praxispartnern

Veröffentlicht am 4. Dezember 2014.
Vom 10. bis 14. November 2014 wurden am Explorationsprojekt, der Sternstraßenbrücke über die Kaditzer Flutrinne, Brückenhauptprüfungen von mehreren Kooperationspartnern durchgeführt. Mithilfe der händischen Zustandsbewertung für einen Teil der Brücke lassen sich Aufnahmedaten der Flugrobotersensorik hinsichtlich ihrer Leistungsfähigkeit beurteilen. Hierzu wurden an unzugänglichen Bereichen der Brücke charakteristische Schäden markiert. Diese werden bei einem der nächsten Flugtests im Frühjahr 2015 gezielt angeflogen, um die gesamte Flugrobotersensorik zu testen.
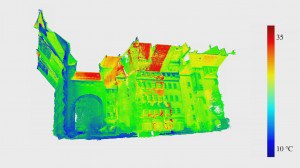
3D-Rekonstruktion von Wärmebilddaten
Veröffentlicht am 24. November 2014.
Die geometrische 3D-Rekonstruktion von Fassaden komplexer Gebäude einzig aus 2D-Bilddaten einer Wärmebildkamera wurde erfolgreich abgeschlossen.
Das Video zeigt als Ergebnis einen virtuellen Rundflug durch die aus mehr als 12 Mio. Punkte bestehende 3D-Punktwolke des Innenhofs der Gedenkstätte Münchner Platz auf dem Campus der TU Dresden. Jeder Einzelpunkt wird dabei entsprechend der Temperatur der zum Aufnahmezeitpunkt reflektierten Infrarotstrahlung farbkodiert dargestellt. Videolink: http://youtu.be/PxQJVLwij9Y
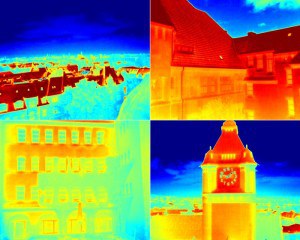
Aufzeichnung von Thermographiedaten
Veröffentlicht am 27. Oktober 2014.
Anfang Oktober fand erneut ein ADFEX-Flug statt. Der durch Hülsse- und Schuhmannbau eingeschlossene Innenhof auf dem Campus der TU Dresden wurde vollständig durch Aufnahmen einer Wärmebildkamera erfasst. In der weiteren Verarbeitung werden aus diesen Aufnahmen thermische 3D-Fassadenmodelle berechnet und mit bereits bestehenden Laserscannerdaten verschnitten. Neue Ergebnisse erscheinen in Kürze an dieser Stelle.
Virtueller Flug durch 3D-Modell

Veröffentlicht am 10. Oktober 2014.
Es konnte ein erstes 3D-Modell der Flutrinnenbrücke “Sternstraße” erzeugt werden. Zugrunde liegt die Datenaufzeichnung der Befliegung vom 03.09.2014 durch das ADFEX-Projekt der TU Dresden. Hierbei wurde die Brücke stückweise durch Flugroboter mit einer hochauflösenden Kamera fotografiert – es konnte eine nahezu vollständige Ablichtung erreicht werden. Die einzelnen Teilbilder dienten der photogrammetrischen Rekonstruktion als Punktwolke mit Farb- und Normaleninformationen pro Punkt.
Aus dieser hochaufgelösten Punktwolke mit ca. 23 Millionen Punkten wurde anschließend ein vereinfachtes Oberflächenmodell berechnet, welches die Brücke mit ca. 700000 Dreiecken darstellt, um eine echtzeitfähige Interaktion auf einem herkömmlichen Arbeitsplatzrechner zu ermöglichen. Zur Erhaltung des Detailierungsgrades wurden die Farbinformationen jedes einzelnen Punktes aus der Punktwolke in einem Texturatlas gespeichert, welcher mit dem Dreiecksnetz verknüpft ist. Im Durchschnitt ergeben sich ca. 95 Farbinformationen pro Dreieck, insgesamt sind es ca. 65 Millionen. Neben interpolierten Werten repräsentieren sie die ursprünglichen 23 Millionen Farbinformationen der Punktwolke nahezu vollständig. Das finale Rendering des virtuellen Fluges kann unter folgendem Video-Link angesehen werden: http://youtu.be/8xaDWplyy8k
3D-Punktwolke

Veröffentlicht am 16. September 2014.
Ein erstes Ergebnis unseres zweiten Fluges Anfang September liegt vor. Basierend auf den Aufnahmen der hochauflösenden Farbkamera wurde eine aus ca. 23 Millionen Einzelpunkten bestehende 3D-Repräsentation der Flutgrabenbrücke der Sternstraße in Dresden berechnet. Als nächstes geplant ist die Integration der Wärmebilddaten. (Klicken Sie für eine vergrößerte Darstellung direkt auf die Abbildung.) Folgen Sie dem Link für einen virtuellen Rundflug durch die Punktwolke: youtu.be/bvYU-j12YfU
ADFEX im Dresdner Universitätsjournal

Veröffentlicht am 16. September 2014.
Unter der Überschrift »Flugroboter für 3D-Modelle« werden die Arbeiten unserer Nachwuchsforschergruppe im aktuellen Dresdner Universitätsjournal (14/2014, Seite 1) vorgestellt. Lesen Sie den Artikel gern online in der digitalen PDF-Ausgabe.
Interaktiver Kameraflug

Veröffentlicht am 8. September 2014.
Nach der ersten erfolgreichen Befliegung im Mai konnte ein zweiter Flug am 3. September absolviert werden. Das Ziel bestand darin, die ca. 150 m lange Brücke “Sternstraße” vollständig mit einer an Bord befindlichen hochauflösenden Fotokamera sowie einer Thermalkamera, die sich auf einem zweiten Flugroboter befand, abzulichten. Hierbei wurden einzelne Aufzeichnungen bereits während der Befliegung per WLAN an eine Bodenstation übermittelt. Das visuelle Feedback erlaubte eine unmittelbare qualitative Einschätzung der Aufnahmen und durch die interaktive Kommunikation mit der Bordsensorik – u.a. die direkte Nachjustierung von Kamera-Einstellungen - konnten optimale Belichtungsergebnisse erreicht werden.
Aus den aufgenommenen Daten wird in einem Nachverarbeitungsschritt ein digitales 3D-Modell der Brücke berechnet, welches mit Farb- wie auch Thermal-Informationen überlagert werden kann.
Projektvorstellung
Im Rahmen des ADFEX-Projektes (Adaptive föderative 3D-Exploration mit Multi-Roboter-Systemen) sollen Schlüsseltechnologien für den teilautonomen Betrieb eines luftgestützten Multi-Roboter-Systems zur 3D-Exploration von ausgedehnten Objekten entwickelt werden. Es soll insbesondere für Brücken eine Möglichkeit der Überwachung des Bauzustandes und der Dokumentation von Schäden geschaffen werden.
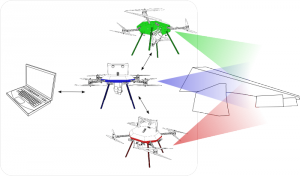
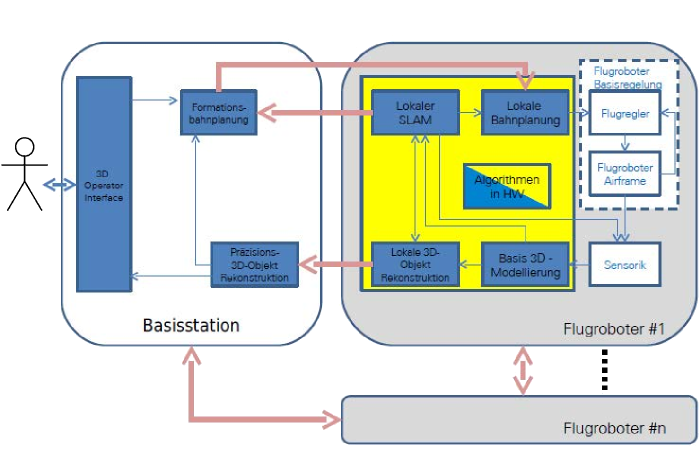
Die mobile Datenaufnahme erfolgt mit Flugroboterplattformen, die neben der bildgebenden Sensorik über eine leistungsfähige Bordrechnerarchitektur verfügen. Die Flugplattform (Octocopter-Rahmensystem + Flugrechner) dienen als mobile Träger für die Nutzlastkomponenten (Sensorik und Bordrechner). Im Zuge der Nutzdatenakquisition kommen neben handelsüblichen Kameras eine Reihe weiterer bildgebender Sensoren zum Einsatz: Laserscanner ermöglichen die schnelle und zuverlässige Generierung hochwertiger 3D-Modelle, thermische Kameras werden insbesondere für eine Oberflächentemperaturüberwachung eingesetzt, während Infrarotkameras beispielsweise für die Beurteilung von Vegetation bzw. Vegetationsgüte oder -schädigung verwendet werden. Die bordseitige Informationsverarbeitung umfasst die Algorithmen zur teilautonomen Bewegungssteuerung der Flugplattform (Navigation bzw. simultane Lokalisierung und Kartographierung) sowie zur bordseitigen Vorverarbeitung der bildgestützten Sensordaten und 3D-Modellierung des Explorationsobjektes. Diese Daten werden ebenfalls von der Navigation genutzt. Die vorverarbeiteten Bilddaten bzw. 3D-Modelldaten werden über eine Funkschnittstelle an die stationäre Basisstation zur weiteren Verarbeitung geschickt. Aufgrund der hohen Datenraten (hochauflösende Bildsensorik) müssen auch Techniken der bordseitigen Datenreduktion bzw. -kompression betrachtet werden.
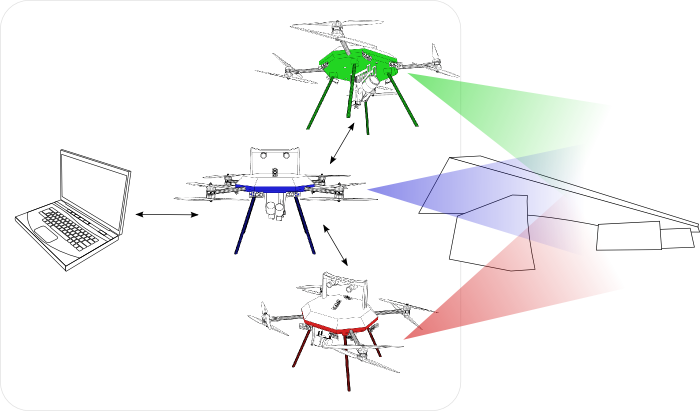
In der Basisstation erfolgen die Präzisionsrekonstruktion eines 3D-Modells des Explorationsobjektes sowie eine nutzerfreundliche Darstellung des rekonstruierten 3D-Objektmodells. Ausgehend von der Rekonstruktionsgüte des Modells werden in der Basisstation die Flugbahnen der Flugplattformen für eine bestmögliche Rekonstruktionsgüte optimiert. Eine besondere Herausforderung stellt dabei die Mehrzieloptimierung mehrerer Flugplattformen mit nichtlinearen Nebenbedingungen dar. Prinzipiell erlaubt der gleichzeitige Betrieb von mehreren Flugplattformen, bevorzugt mit unterschiedlichen Sensoren ausgestattet, eine höhere Modellgüte unter Nutzung von Datenfusionsansätzen.
Das Projekt umschließt unter anderem folgende Innovationen:
- Technologien für die 3D-Exploration in Echtzeit mit ausgedehnten und für Menschen schwer zugänglichen Umgebungen: Mithilfe einer Flotte von Flugrobotern, die mit unterschiedlichen Sensoren ausgestattet sind, soll es möglich sein, Bereiche von Brücken zu erfassen, die für einen Menschen schwer oder nur mit technischen Hilfmitteln wie Hubkränen erreichbar sind. Die gewonnenen Daten umfassen ein breites Spektrum, etwa 3D-Messungen, Fotografien oder Wärmebilder.
- Nutzerfreundliche Mensch-Maschine-Lösungen für 3D-Explorationsaufgaben: Nutzer der entstehenden Lösung sind hauptsächlich Industriepartner. Um ihnen einen effizienten Umgang ohne langwierige Schulungsmaßnahmen zu ermöglichen, wird besonderer Wert auf Nutzerfreundlichkeit der für den Verwender sichtbaren Endanwendung gelegt. Das umschließt mehrere Bestandteile, wie zum Beispiel eine übersichtliche Anwendung zur Live-Überwachung der Flugroboter am Boden oder eine Möglichkeit zur Auswertung der 3D-Daten im Büro. Darüber hinaus wird es möglich sein, über Stereokameras, die an einem Flugroboter angebracht sind und eine Videobrille, von der Position des Roboters aus zu sehen. Durch überblendete Sensorinformationen behält der Nutzer dabei die Kontrolle über die Roboter.
- Verarbeitung von 3D-Daten in Echtzeit auf kompakten Rechnerplattformen: Ein Hauptziel ist die 3D-Vermessung der beflogenen Objekte, speziell eine Echtzeitverarbeitung eines Teils der gemessenen Daten und die Synthese von 3D-Daten zu einem 3D-Modell, das dann auf der Bodenstation angezeigt wird. Die Herausforderung besteht insbesondere in der zuverlässigen Kommunikation zwischen den Flugrobotern, sowie der Bodenstation und der Registrierung, also dem Zusammenfügen von Teilscans zu einer 3D-Darstellung. Die Generierung eines hochauflösenden 3D-Modells und die Integration weiterer Sensordaten erfolgt in einem zeitlich intensiveren Nachverarbeitungsschritt nach der Akquise aller Daten. Normalerweise wird es mehr als eine Befliegung eines Objektes geben. Auch hier stellt die Integration eines bereits berechneten hochauflösenden Modells und weiterer Sensordaten eine Herausforderung dar.
- Steuerungskonzepte für koordiniert arbeitende Multi-Roboter-Systeme: Die Grundaufgabe der Bewegungsführung beinhaltet die
Umsetzung von benutzerdefinierten Explorationswünschen in konkrete Flugbahnen in Form von zeitveränderlichen Sollwerten für die Pose jedes einzelnen Flugroboters unter Berücksichtigung von flugtechnischen und anwendungsspezifischen Randbedingungen. Ein besonderes Spezifikum des ADFEX-Systems und damit eine höchst innovative Eigenschaft ist die Adaptionsfähigkeit der optimierten Flugbahnen über die Rückkopplung der aktuell ermittelten Explorationsgüte. Dazu werden spezielle Lenkgesetze für einen Einzelroboter entwickelt, die dann mit Basisfunktionen für eine Konstellation von mehreren Flugrobotern erweitert werden. Hierfür müssen zunächst geeignete Bewegungsprimitive gelöst werden, mit denen einerseits eine benutzerfreundliche Spezifikation von Explorationsszenarien erfolgen kann und andererseits flugtechnisch einfach zu realisierende Elementarbewegungen der Flugroboter möglich sind. - Automatische Umsetzung rechenintensiver und zugleich energieeffizienter Anwendungen durch compiler-gestütztes HW/SW-Co-Design: Durch die starke Einschränkung der zur Verfügung stehenden Energiemenge muss der Bordrechner der Flugroboter besonders energieeffizient arbeiten. Im Hinblick auf die benötigte Rechenleistung für die zu erwartenden Regelungs- und Bildverarbeitungsalgorithmen soll eine mobile adaptive Computing-Plattform entwickelt werden, die insbesondere hohe Rechenleistung energieeffizient bereitstellen kann. Die höchste Energieeffizienz weisen heute immer noch spezialisierte Mikrochips auf, die eine vorgegebene Aufgabe komplett in Hardware realisieren. Insbesondere Field Programmable Gate Arrays (FPGAs) stellen eine Möglichkeit dar, Aufgaben in Hardware zu realisieren, lassen sich aber dynamisch zur Laufzeit der Anwendung rekonfigurieren und sind somit hochgradig adaptiv. Das Ziel ist die Abbildung rechenintensiver Teile auf entsprechende Hardware-Komponenten, um die Berechnung komplexer Algorithmen zu beschleunigen und so die Prozessoren der Computing-Plattform zu entlasten.
- Technisch-ökonomische Einbindung der Multi-Roboter-Syseme in bauspezifische Prozesse: Es existiert eine Vielzahl von Szenarien für den Einsatz der Multi-Roboter-Systeme in Bauprozessen und in der Diagnostik von Bauteilen oder Bauwerke. Im Lebenszyklus von Bauwerken wird zwischen unterschiedlichen Lebenszyklusphasen unterschieden, die sich stark voneinander abgrenzen. Somit unterscheiden sich auch die Anforderungen an den Einsatz der Flugroboter in den jeweiligen Phasen, wie beispielsweise der Planung, der Herstellung oder des Betreibens eines Bauwerks. Im Vergleich zu bisher bekannten und allgemein verbreiteten Prozessen im Rahmen der Planung, Herstellung, Überwachung und Inspektion von Bauwerken werden durch den Einsatz der Flugroboter Optimierungspotenziale oder neuartige Prozessabläufe und zahlreiche Verbesserungen möglich. Es ist davon auszugehen, dass sich somit ebenfalls Effekte der Kosten- und Zeitersparnis bei der Realisierung von Bauvorhaben und bei dem Betreiben von Bauwerken ergeben. Damit eng verbunden ist die Untersuchung des Marktpotenzials für Multi-Roboter-Systeme in der Bauwirtschaft.
Das ADFEX-Projekt bietet die Möglichkeit einer interdisziplinären Zusammenarbeit verschiedener Institute und besteht aus Informatikern, Elektrotechnikern, Geodäten und Bauingenieuren. Eine Liste der beteiligten Mitarbeiter finden Sie in der nachfolgenden Übersicht.
Mitarbeitende
Der interdisziplinäre Ansatz des Projektes lässt sich nur mithilfe von Nachwuchsforschern unterschiedlicher Forschungsrichtungen verwirklichen. Am Projekt ADFEX sind daher verschiedene Professuren unterschiedlicher Institute der Technischen Universität Dresden beteiligt.
Von links nach rechts, vordere Reihe: Markus Vogt, Martin Pfanne, Michael Klix; Mittlere Reihe: Ludwig Schmutzler, Jan Hoyer, Frank Schnitzer, Toni Thiele; Hintere Reihe: Peter Urban, Patrick Westfeld, David Mader, Joachim Staib
Professur Automatisierungstechnik
Fakultät Elektrotechnik und Informationstechnik, Institut für Automatisierungstechnik. Die Professur wurde geleitet von Prof. Dr. techn. Klaus Janschek.
- Frank Schnitzer
- Michael Klix
- Martin Pfanne
- Toni Thiele
Professur Mikrorechner
Fakultät Informatik, Institut für Technische Informatik
- Markus Vogt
- Jan Hoyer
- Gerald Hempel
Professur Computergraphik und Visualisierung
Fakultät Informatik, Institut für Software- und Multimediatechnik. Professur wird geleitet von Prof. Dr. Stefan Gumhold
- Ludwig Schmutzler
- Joachim Staib
- Peter Urban
- Nico Schertler
Professur Photogrammetrie
Fakultät Umweltwissenschaften, Institut für Photogrammetrie und Fernerkundung. Professur wird geleitet von: Prof. Dr. sc. techn. Hans-Gerd Maas
Professur Baubetriebswesen
Fakultät Bauingenieurwesen, Institut für Baubetriebswesen. Professur wird geleitet von: Prof. Dr.-Ing. Rainer Schach
- Christian Flemming
- Cornell Weller
- Michael Polter
Flugplattformen
Hauptbestandteil des Projekts sind drei Flugroboter, die mit verschiedensten Sensoren ausgestattet unterschiedliche Teilbereiche der Akquise abdecken.

Das Rahmensystem aller Roboter basiert auf der Octocopter-Plattform Goliath Coax 8 der Firma Cadmic GmbH. Sie bieten eine schnell zerlegbare und gleichzeitig robuste Konstruktion, die im geschützten Innenraum ausreichend Platz für Elektronikkomponenten und am Gehäuseäußeren viele Möglichkeiten für die Befestigung zusätzlicher Hardware bereitstellt. Das System ist für ein Gesamtgewicht bis 7kg geeignet. Zusätzliche Anpassungen betreffen den Anbau und die Fixierung von Bordelektronik und Bordsensorik. Das Rahmensystem setzt sich aus dem Goliath-Rahmen, den Anbauten für zusätzliche Hardware, dem Antrieb der Flugplattformen und der Stromversorgung zusammen. Direkt am Rumpf sind die vier Auslegerarme befestigt. Diese sind horizontal ausgerichtet und stehen in einem Winkel von 45° vom Rumpf ab. Unter dem Rumpf sind vier Landebeine angebracht, die sich jeweils genau unter einem Auslegerarm befinden. Im Rumpfinneren sind die Motorregler untergebracht. Flugregler,Bordrechner, Akkus und weitere Elektronikkomponenten werden auf einer zusätzlichen Elektronikebene befestigt, die am Rumpf fixiert wird. Eine Haube dient als Abdeckung und schützt die Elektronik im Plattforminneren vor leichter Witterung. Die Haube wird auf der Rumpfoberseite festgeschraubt.
Alle Komponenten des Antriebs sind Bestandteil der Lieferung von Cadmicopter und werden deshalb dem Rahmensystem zugeordnet. Zum Antrieb gehören:
- Motorregler, Typ Herkules III, steuern die Drehgeschwindigkeit der Motoren,
- BLDC-Motoren, TIGER MN4012-13 340KV, treiben die Propeller an,
- Propeller, erzeugen den notwendigen Schub.
Die Motoren sind an den Auslegerarmen befestigt und daher gleichmäßig um den Schwerpunkt verteilt. An jedem Ausleger befinden sich ein nach oben und ein nach unten gerichteter Motor, deren Propeller sich aus Sicht der Plattform gegenläufig drehen. Jeweils über Kreuz angebrachte Motoren der Plattform haben die gleiche Drehrichtung. Jeder Motorregler ist mittels I2C Bus Protokoll an den Flugregler angeschlossen.
Die Stromversorgung der einzelnen Flugroboter erfolgt über je zwei wiederaufladbare Lithium-Inonen-Akkus (SLS XTRON 5000mAh 6S1P 22,2V 30C/60C ). Für Elektronikkomponenten notwendige Spannungen ungleich der gelieferten 22,2 V werden durch Schaltregler bereitgestellt.
Die Anbringung zusätzlicher Hardware (z. B. Sensoren, Scheinwerfer usw.) an das Goliath-Rahmensystem erfolgt über verschiedene Anbauten an der Rumpfunterseite, der Haubenoberseite und den Landebeinen. Art und Anzahl der Anbauten richten sich nach dem Einsatzzweck des Flugroboters. Für jeden Sensortyp steht ein spezieller Sensorträger zur Verfügung. Je nach Ausstattung der Plattformen unterscheiden sich somit auch Anzahl, Ort und Art der Anbauten.
Basis-Sensorik
Alle drei Plattformen sind mit grundlegender Sensorik versehen, die eine einfache Navigation und Systemüberwachung ermöglicht. Ebenfalls auf allen Plattformen sind weitere Sensoren für eine verbesserte Navigation und Hinderniserkennung. Spezifische Sensorik ist – entsprechend der Aufgabenverteilung – jeweils nur auf einzelnen Plattformen angebracht.
Die Basissensorik erlaubt den Flugrobotern eine globale und inertiale Navigation sowie die Überwachung wichtiger Systemparameter. Für diesen Zweck verfügt jede Plattform über:
- GPS-Empfänger, ermittelt die globale Position des Flugroboters,
- Inertial Measurement Unit (IMU ), umfasst diverse Sensoren für die Bewegungs-/ Höhen- und Temperaturmessung,
- Spannungsmessung, überwacht die Spannung der Akkus bzw. der Akkuzellen und die verbleibende Akku-Kapazität.
Die Basissensorik ist im Rumpfinneren untergebracht. Der GPS-Empfänger dient der Erfassung der globalen Roboterposition im Referenzkoordinatensystem. Zusätzlich zur Position stehen auch abgeleitete Geschwindigkeitsinformationen zur Verfügung. Weiterhin können die aktuelle Satellitenkonfiguration, die Signalstärke, DOP-Werte (Dilution of Precision; Verringerung der Genauigkeit durch die (unvorteilhafte) relative Position von Satelliten) und die GPS-Satellitenzeit ausgelesen werden. Die Inertial Measurement Unit (kurz: IMU ) erlaubt die Messung der relativen Bewegungen einer Flugplattform, d. h. deren relative Orientierung und translatorische Geschwindigkeit und Höhe. Diese Daten werden sowohl für die Stabilisierung und Lageregelung, als auch für die Navigation verwendet. In der IMU sind verschiedene Sensoren (Gyroskop, Beschleunigungssensor, 3-Achsen-Magnetometer, barometrisches Altimeter, Temperatursensor) in einem Gehäuse verbaut, das auf der Platine der Flugreglers befestigt ist. Die Spannungsmessung erfolgt über das Graupner Electric Air-Modul, das mit den Akkus verbunden und direkt an den RC-Empfänger angeschlossen ist.

Zur Zusatzsensorik zählen Ultraschallsensoren und Navigationskamera. Die Ultraschallsensoren SRF08 messen die Distanz bis zum nächsten, sich in Sichtrichtung befindenden Objekt. Sie dienen damit der Kollisionsvermeidung und stellen sicher, dass sich der Flugroboter einem Hindernis nur höchstens auf die minimal erlaubte Entfernung nähert. Durch eine geeignete Anbringung und überlappende Schallkegel können bei horizontalem Flug auch kleine Hindernisse erkannt werden. Die Entfernungssensoren unter und über der Plattform sind entlang der Hauptflugrichtung gekippt und sichern die Bereich direkt über bzw. unter dem Roboter durch überlappende Bereiche.
Die Navigationskamera Chameleon CMLN-13S2M-CS stellt Informationen über die Umgebung bereit und erlaubt, zusammen mit der IMU, die Bestimmung der kinematischen Zustände des Flugroboters. Durch das Fischaugenobjektiv Lensagon BF2M12520 kann die gesamte untere Hemisphere abgebildet werden; die Linse beschränkt den Bildbereich jedoch auf einen kreisförmigen Ausschnitt. Die Navigationskamera beinhaltet einen global shutter, so dass kurze Belichtungszeiten ermöglicht werden und daher auch schnelle Bewegungen nicht zu Verwischungseffekten der Bilddaten führen.
Für Flug der Plattform unbedingt notwendig ist der Flugregler. Er wird vom Institut für Flugmechanik und Flugregelung der Universität Stuttgart bezogen. Der Flugregler besteht aus einem FPGA-Modul, das auf einem Trägermodul und einem Schnittstellenmodul angebracht ist. Auf letzterem ist auch die Inertial Measurement Unit befestigt. Der Flugregler liest die Daten der IMU und des GPS-Empfängers aus und leitet deren Daten an den Bordrechner weiter. Als Eingangssignale können dem Flugregler gewünschte Orientierungen bzw. Geschwindigkeiten der Plattform vorgegeben werden. Der Flugregler berechnet daraus die Drehzahl der acht Motoren, so dass sich die Flugplattform entsprechend dem gewünschten Verhalten bewegt. Die Vorgaben zur Bewegung werden im Allgemeinen durch den Bordrechner vorgegeben. Sollte eine Eingriff in ein Flugmanöver notwendig sein, kann an der Fernsteuerung auf manuelle Bedienung umgeschaltet werden. In diesem Fall erfolgen Flugvorgaben direkt vom menschlichen Piloten per Fernbedienung.
Spezifische Sensorik
Als Spezifische Sensorik werden Laserscanner, hochauflösende RGB-Kamera, Dreikamerasystem und Stereokamera bezeichnet. Jeder der Sensoren wird nur auf einer der Flugplattformen angebracht.
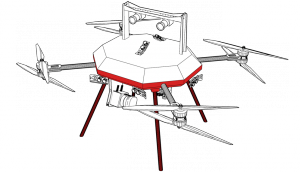
Flugroboter Rot
Dieser Roboter ist mit dem Laserscanner Hokuyo UTM-30LX-EW ausgestattet. Er ermöglicht während des Fluges die Erstellung eines groben 3D-Modells des Zielobjektes. Dieses Modell kann einerseits für die Hindernisvermeidung genutzt werden und andererseits dem Nutzer an der Basisstation einen guten und schnellen Überblick über das Explorationsobjekt bieten.

Flugroboter Grün
Besonderes Merkmal dieses Roboters ist die hochauflösende RGB-Kamera Prosilica GT3300C. Sie dient der Foto-Dokumentation des Explorationsobjektes. Jeder Zentimeter der Oberfläche des Zieles wird auf den Bilddaten festgehalten und kann im Nachhinein vom Nutzer begutachtet werden. Weiterhin werden die Bilddaten genutzt, um eine hochgenaues 3D-Modell des Objektes zu erstellen.
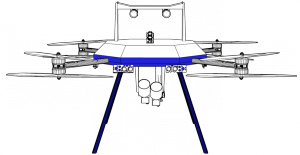
Flugroboter Blau
Das Dreikamerasystem dieses Roboters besteht aus einer RGB-Kamera Mako G-419C, einer Nahinfrarotkamera (NIR) Mako G-223B und einer Wärmebildkamera FLIR A65. Mithilfe der NIR-Kamera können im Bildmaterial organische Elemente (z. B. Pflanzen) schnell und zuverlässig erkannt werden. Die Wärmebildkamera ermöglicht die Messung absoluter Temperaturen und eigent sich somit vor allem zur Detektion von Bauschäden durch Wasser, da dort deutliche Temperaturunterschiede erkennbar sind.
Die Stereokameras XCL-C30C können genutzt werden, um dem Nutzer bzw. Bediener einen besseren Eindruck vom Flug der Roboterplattform zu geben. Mit Hilfe einer Augmented Reality-Brille kann das Gefühl einer First-Person-Fluges vermittelt werden, bei dem der Nutzer das Explorationsobjekt so sieht wie die Plattform.
Bei der Auswahl der Basis- und Zusatz-Sensoren wurden insbesondere berücksichtigt, dass der Standard der Schnittstelle frei verfügbar, bzw. beschaffbar ist. Großer Wert wurde außerdem auf die Minimierung der Anzahl verschiedener Betriebsspannungen gelegt.
Boardrechner
Hauptkomponente des Bordrechners stellt ein Evaluationsboard der Firma enclustra basierend auf einem Zynq-7000 System-on-Chip (SoC) der Firma Xilinx dar. Der verwendete SoC-Chip ist eine Kombination aus Field Programmable Gate Array (FPGA) und einem ARM Prozessor mit zwei Cortex-A9-Kernen. In Kombination bieten diese beiden Komponenten sowohl ausreichend Rechenleistung (ARM 2 x 800 MHz) also auch die Möglichkeit, anwendungsspezifische Hardwarekomponenten im programmierbaren Logik-Teil (FPGA) zu implementieren und zur Laufzeit des Systems auszutauschen (FPGA).
Als Erweiterung zum angeschafften Evaluationsboard ist eine Platine entworfen worden. Auf dieser befinden sich neben weiteren Schnittstellen zur Sensoranbindung mehrere Spannungsregler, welche die Betriebsspannungen für andere Komponenten bereitstellen.
Publikationen
G. Hempel u. a. „Register allocation for high-level synthesis of hardware accelerators targeting FPGAs.“ In: Reconfigurable and Communication-Centric Systems-on-Chip (ReCoSoC), 2013 8th International Workshop on. 2013, S. 1–6. doi: 10.1109/ReCoSoC.2013.6581522.
M. Klix u. a. „Guidance-Navigation-Control System zur 3D-Exploration von Ausgedehnten Objekten mit Multi-Roboter-Systemen.“ In: Tagungsband 63. Deutscher Luft- und Raumfahrtkongress (Sep. 2014).
D. Mader, P. Westfeld und H.-G. Maas. „An integrated flexible self-calibration approach for 2D laser scanning range finders applied to the Hokuyo UTM-30LX-EW.“ In: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Bd. XL-5. 2014. Link
M. Pfanne und K. Janschek. „Integrierte Bewegungsführung für einen Unbemannten Multirotor in Urbanen Gebieten.“ In: Tagungsband 63. Deutscher Luft- und Raumfahrtkongress (Sep. 2014).
M. Pfanne und K. Janschek. „Time-efficient Trajectories under Velocity and Acceleration Constraints.“ In: Proceedings of IEEE International Conference on Autonomous Robot Systems and Competitions – ICARSC 2014. Espinho, Portugal, Mai 2014.
J. Staib, M. Spehr und S. Gumhold. „User Assisted Exploration and Sampling of the Solution Set of Non-Negative Matrix Factorizations.“ In: Proceedings of the IADIS Multi Conference on Computer Science and Information Systems (MCCSIS 2014) on Data Mining. Lissabon, Portugal, Juli 2014
C. Weller. „Adaptive föderative 3D-Exploration mit Multi-Roboter-Systemen im Bauwesen.“ In: Tagungsband 25. BBB-Assistententreffen 2014 – Fachkongress der wissenschaftlichen Mitarbeiter der Bereiche Bauwirtschaft, Baubetrieb und Bauverfahrenstechnik. Graz, Österreich, Juni 2014.
P. Westfeld, D. Mader, R. Blaskow und H.-G. Maas. „UAV-based Acquisition of TIR-attributed 3D Point Clouds for Building Energy Evaluation.“ In: LowCost3D – Sensors, Algorithms, Applications. 2014
D. Mader, R. Blaskow, P. Westfeld und H.-G. Maas. „UAV-based Acquisition of 3D Point Clouds – A Comparison of a Low-Cost Laser Scanner and SfM Tools“ In: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. XL-3/W3. 2015. Link toISPRS Archives
P. Westfeld, D. Mader und H.-G. Maas. „Generation of TIR-attributed 3D Point Clouds from UAV-based Thermal Imagery.“ In: Photogrammetrie – Fernerkundung – Geoinformation. Organ der DGPF. Schweizerbart’sche Verlagsbuchhandlung. Jahrgang 2015, Heft 5, S. 381-393. Link
D. Mader, R. Blaskow, P. Westfeld, C. Weller. „Potential of UAV-based laser scanner and multispectral camera data in building inspection.“ In: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. XLI-B1. 2016. Link to ISPRS Archives
Infomaterial
Hier finden Sie unseren aktuellen ADFEX-Flyer zum Download (PDF)
Förderhinweis
