WALEMObase - Hydrogen-based, automated lightweight mobility
Project Information
| Project Duration: | 01.01.2023 – 31.12.2025 |
| Sponsored by: | Federal Ministry of Economics and Climate Protection and the Free State of Saxony |
| Budget: | 5,5 Mio. € |
| Financial Support: |
5,2 Mio. € (3,7 Mio. € TU-Dresden) |
Project Description
The aim of WALEMObase is, on the one hand, to lay the technical basis for the public transport of the future using automated and long-range lightweight vehicles in rural areas and, on the other hand, to give local companies access to the high technologies of automation, hydrogen drives and lightweight construction.
In order to achieve the higher ranges and driving performance required in rural areas, a compact, hydrogen-based hybrid drive for an automated minibus is being developed and integrated using the latest lightweight construction technologies.
In addition, narrow, partially unpaved roads with oncoming traffic, limited mobile data connections and the influence of vegetation on navigation satellite reception pose specific challenges for automated vehicles. For this reason, the professorship for vehicle mechatronics is researching a sensor concept for automated minibuses that is specialized for rural areas in the WALEMObase project and is integrating this together with the project partners protected in a vehicle lightweight front mask. With a research vehicle converted in this way, a database with real scenarios is then built up during automated test operation, which creates a valuable research basis for the development and validation of automated driving functions for the previously neglected rural area.
Contact Person
 © Ansgar Dietermann
© Ansgar Dietermann
Project Manager
NameDr.-Ing. Steffen Kutter
Send encrypted email via the SecureMail portal (for TUD external users only).
Project Partners
Project Activity: Route Analysis
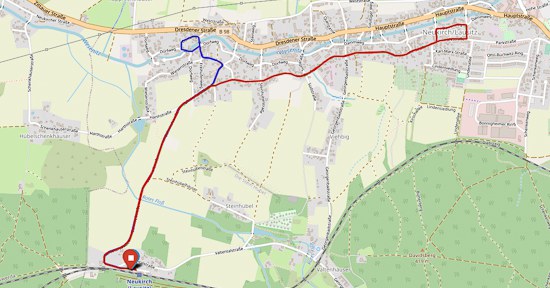
Neukirch
In the course of the project, minibuses are to be driven automatically on selected routes in Lusatia in order to show the potential and possibilities of automated public transport in rural areas, to evaluate challenges and to build up a database with real scenarios.

Kitten
In cooperation with the ZVON, the Professorship of Vehicle Mechatronics (FZM) selected the three potential routes in Lusatia shown below and carried out test drives with the ABSOLUT shuttle bus between the end of 2022 and the beginning of 2023.
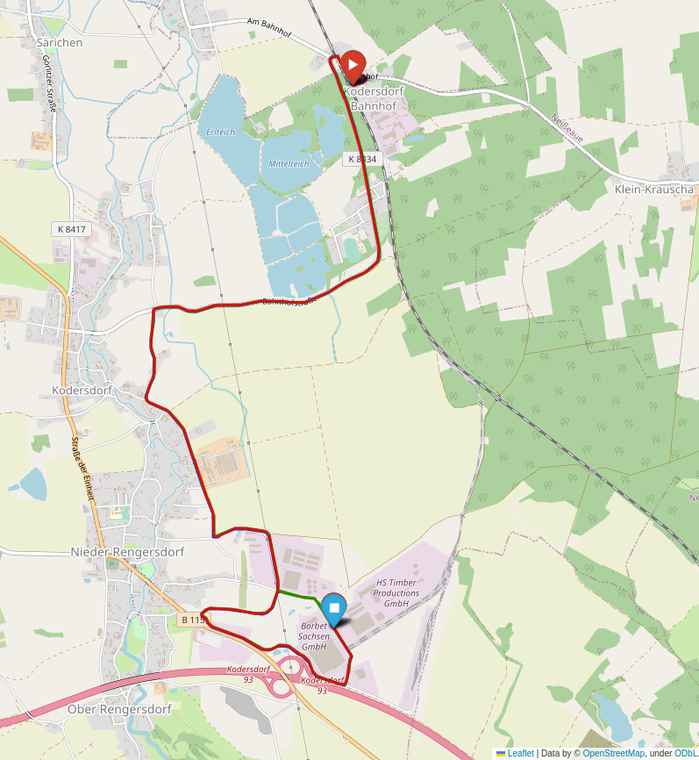
Kodersdorf
For a robust automated operation of the minibuses, reliable localization is essential. For this reason, the GNSS navigation is supplemented by a LiDaR-based process and the routes are mapped in advance in manual driving mode using the LiDaR. The figure below shows such a mapping as an example for the Neukirch route.
The streets and individual house fronts are clearly visible. While driving, the vehicle measures the distance to surrounding points and an algorithm calculates the current pose of the vehicle from the comparison with the geometries stored in the map. The data was obtained during the inspection and is an important basis for evaluating where the vehicle can locate itself using the LiDaR sensor and ultimately drive in automated mode.

Route Neukirch as LiDaR Map