Steuerung von seriellen Manipulatoren
| Modulname: | Robotik |
| Modulnummer: | ET-12 01 12 |
| Modulname: | Robotik Grundlagen |
| Modulnummer: | MT-A08-G |
| Modulname: | Robotersteuerungen für WING |
| Modulnummer: | MA-WW-ING-1409a D-WW-ING-1409a |
| Lehrbeauftragter: | Prof. Dr. techn. K. Janschek |
| Übungsleiter: | Dr.-Ing. E. Dueblenk |
| Anmeldung/Downloads: | weiter zu OPAL |
Beachten Sie bitte wichtige Hinweise im OPAL-Kurs im Zusammenhang mit PO-Änderung und Zwangsübertritt in WS26/27!
| Ankündigung SS2026 - Steuerung von seriellen Manipulatoren | |||
| Vorlesung | donnerstags | 2. DS | BAR/0I88/U |
| Übung | montags (2. WO), | 2. DS | BAR/0I88/U |
| Beginn | 16. April 2026 | 2. DS | BAR/0I88/U |
Ziel des Lehrfaches
Vermittlung von grundlegenden Steuerungs- und Regelungskonzepten für Serielle Manipulatoren
Inhalt des Lehrfaches
Vorlesungen
EINFÜHRUNG INDUSTRIEROBOTIK
Robotersysteme - Begriffsbestimmung, Serielle Manipulatoren - Kinematikkonfigurationen, Manipulationsaufgaben, Steuerungsaufgaben
VORWÄRTSKINEMATIK
Elementare räumliche Beschreibungsform, Homogene Transformationen, Beschreibung von seriellen Kinematiken
INVERSE KINEMATIK
Allgemeine Problemformulierung, Allgemeiner Lösungsansatz, Lösung bei kinematischer Entkopplung
TRAJEKTORIEN
Allgemeine Problemformulierung, Elementare Bewegungsabläufe, Glatte Trajektorien für Einzelachsen, Trajektorienerzeugung im Gelenkraum, Trajektorienerzeugung im kartesischen Arbeitsraum, Eigenachsenrotation
DIFFERENTIELLE KINEMATIK
Geometrische Jacobi-Matrix, Analytische Jacobi-Matrix, Eigenschaften der Jacobi-Matrix, Singularitäten, Rekursive Inverse Kinematik, Statische Kräfte, Redundante Manipulatoren
ROBOTERDYNAMIK
Repetitorium Modellierungsgrundlagen, Bewegungsgleichungen im Gelenkraum, Bewegungsgleichungen im kartesischen Raum, Flexible Gelenke
POSITIONSREGELUNG
Allgemeine Aufgabenstellung, Manipulatordynamik mit Gelenkantrieben, Elementare Regelungskonzepte, Dezentrale Einzelgelenkregelung, Zentrale Einzelgelenkregelung - Mehrgrößenregelung, Regelung in Arbeitsraumkoordinaten '
KRAFTREGELUNG
Allgemeine Aufgabenstellung, Steifigkeits-/Nachgiebigkeitsregelung - Stiffness/Compliance Control, Impededanzreglung - Impdedance Control, Direkte Kraftregelung - Force Control, Hybride Kraft-/Positionsregelung
Übungen
Berechnungsbeispiele für typische Entwurfsaufgaben unter Nutzung von Matlab/-Simulink
Prüfungseinsicht
Für Klausureinsicht werden Termine persönlich per Email vereinbart.
Position vs. Force Control © Ch. Yao
Positionsregelung vs. Kraftregelung
- Demobeispiel mit einem youBot 5-DOF Manipulator von Kuka
- Positionsregelung: Positionssollwerte werden bestmöglich realisiert = "steife" Kinematik
- Kraftregelung: Position des Endeffektors ergibt sich aus den vorgegebenen Kontaktkräften = "weiche/nachgiebige" Kinematik
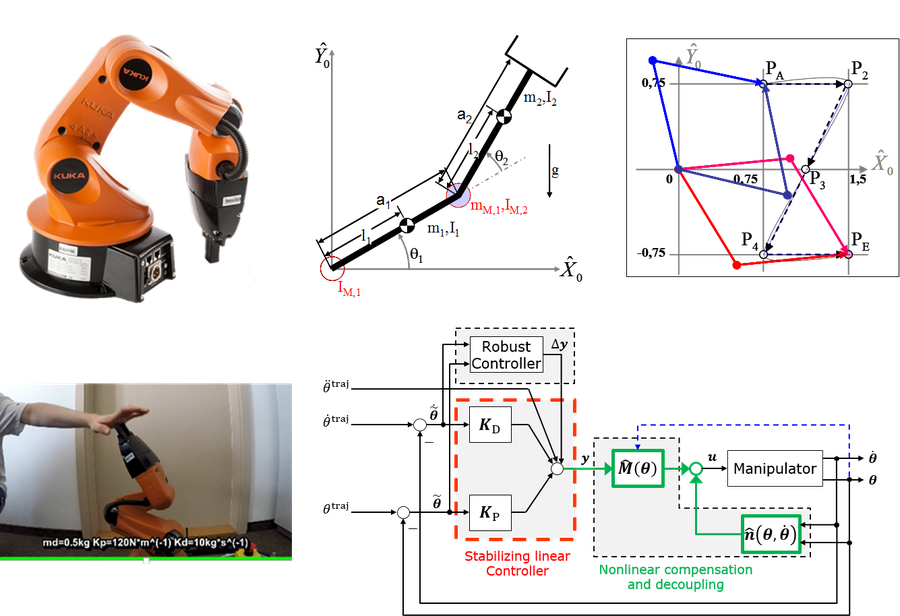
2D Impedance Control with youBot Arm © Ch. Yao
Impedanzregelung
- Demobeispiel für eine nachgiebige Impedanzregelung mit einem youBot 5-DOF Manipulator
- "Impedanz" = mechanische Impedanz Kraft/Weg; hier durch Regelkreis nachgebildet dynamisches Verhalten eines gedämpften Masse-Feder Systems ... "nachgiebig" bei Kontaktkräften
- ermöglicht sichere Mensch-Roboter Interaktion - soft robotics