Ausgeschriebene Arbeiten
Auf dieser Seite halten wir unsere Themen für Studien- und Diplomarbeiten bereit.
Sollte Interesse an einem der vorgeschlagenen Themen bestehen, kontaktieren Sie einfach den zuständigen Mitarbeiter.
--> Unbedingt die am Institut gültige "Richtlinie zur Anfertigung wissenschaftlicher und studentischer Arbeiten" beachten !
Weitere Hinweise (Diplomprüfungsordnung, Empfehlung für die Ausarbeitung wissenschaftlicher Arbeiten...) finden Sie auf den Info-Seiten zum Studium an der Fakultät Elektrotechnik und Informationstechnik.
(Studienarbeit, Diplomarbeit und Masterarbeit)
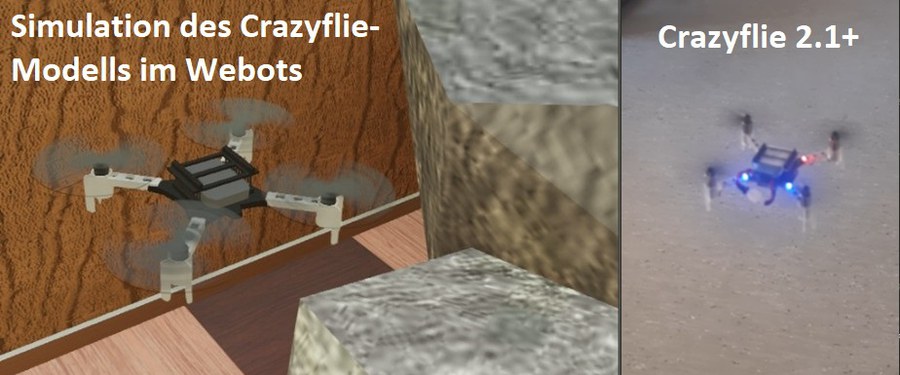
Simulation des Crazyflie Modells in Webots und Flug des realen Crazyflie 2.1+ im Laborraum BAR E62
Im Mittelpunkt stehen die Fragenstellungen zu Möglichkeiten eines vorhandenen Mikroflugrobotersystems in typischen Aufgabenstellungen der mobilen Robotik: Navigation, Guidance, Control.
1. Aufgabengebiet: Im Rahmen einer studentischen Arbeit soll ein Wandfolgeregler für ein vorhandenes Flugrobotersystem entwickelt, implementiert und unter Laborbedingungen getestet werden. Im ersten Schriit soll die Entwicklung durch eine 3D-Simulation im Webots-Simulator unterstützt werden.
Voraussetzungen: Gute Kenntnisse in Programmierung in Python und C, in Programmierung unter Linux für PC und für eingebettete Rechner.
2. Aufgabengebiet: Ein weiteres Aufgabengebiet dieses Themenbereichen liegt in der Simulation des Flugroboters. Im Rahmen einer studentischen Arbeit sollen hier ein vorhandener ROS2/Gazebo-basierter Simulator in Betrieb genommen, erprobt und evaluiert werden.
Voraussetzungen: Gute Kenntnisse in Programmierung in Python, C, C++, in Programmierung unter Linux für PC und unter ROS (Robot Operating System).
Ansprechpartner:
Dr.-Ing. M. Saraoğlu, Tel. 463-43757
Die nachfolgenden Themen sollen einen Beitrag zu einem interdisziplinären Forschungsprojekt mit folgendem Schwerpunkt liefern:
Electronic combined textiles, sog. E-Textiles sind Stoffe oder Gestricke, in die leitfähige Garne und elektronischen Baugruppen eingebettet werden. Eine besondere Herausforderung bei der Herstellung stellen Technologien zur Kontaktierung dar, die sowohl den Eigenschaften der Textilien und der elektrischen Komponenten gerecht werden müssen als auch den Anforderungen der späteren Benutzung. Eine geeignete Auswahl passender Materialien und Technologien erfordert demzufolge eine multikriterielle Auswertung von Eigenschaften der beteiligten Materialien, Geräte und Verfahren.
Thema 1:
Kleben, Löten oder Krimpen, welche Fügetechnologie eignet sich wofür ?
Voraussetzung dafür ist die Erfassung relevanter Eigenschaften aller beteiligen Materialien. Aufgabe dieser studentischen Arbeit ist eine Analyse von möglichen Fügeprozessen wie Kleben oder Niedrigtemperaturlöten und deren Anwendbarkeit für bestimmte Garne und Maschinen. Die Ergebnisse sollen systematisch abstrahiert und strukturiert in einer Datenbank gespeichert werden. Die Analyse der Fügeprozesse erfolgt in enger Abstimmung mit dem Institut für Feinwerktechnik und Elektronik-Design (IFTE).
Ansprechpartner: Dipl.-Ing. Patrick Suwinski, Dr.-Ing. A. Braune
Thema 2:
Digitale Zwillinge in der Textilindustrie - was davon ist nutzbar ?
In der Textilindustrie gibt es bereits Digitale Zwillinge für verschiedene Aspekte der Fertigung oder der Logistik. Die Aufgabe dieser Arbeit besteht deshalb darin, den Stand der Technik für diese Branche zu analysieren und mit den gefundenen Lösungen in diesem Projekt zu vergleichen. Die existierende Datenbank der digitalen Zwillinge soll entsprechend ergänzt und getestet werden.
Ansprechpartner: Dipl.-Ing. Patrick Suwinski, Dr.-Ing. A. Braune
Thema 3:
Entwicklung eines Konzepts zur Prüfbarkeit von KI-Algorithmen anhand einer Fallstudie in der Textilindustrie.
Download der Aufgabenstellung für eine Diplomarbeit
Ansprechpartner: Dipl.-Ing. Patrick Suwinski, Dr.-Ing. A. Braune
Thema 4:
Entwicklung eines Konzepts zum Nachweis der Vertrauenswürdigkeit und Überprüfbarkeit von KI-Algorithmen
Download der Aufgabenstellung für eine Diplomarbeit
Ansprechpartner: Dipl.-Ing. Patrick Suwinski, Dr.-Ing. A. Braune
Thema 5:
Entwicklung einer Beratungssoftware für Architekturoptimierungen künstlicher neuronaler Netze in der Raumfahrt.
Download der Aufgabenstellung für eine Diplomarbeit
Ansprechpartner: Dipl.-Ing. Patrick Suwinski, Dr.-Ing. A. Braune
(Studienarbeit, Diplomarbeit und Masterarbeit)

Die Navigation in der mobilen Robotik umfasst sowohl die Bestimmung der Position und Orientierung eines mobilen Roboters als auch die Bestimmung einer Umgebungskarte. Die modernen Ansätze der Künstlichen Intelligenz mit künstlichen neuronalen Netzen (KNN) werden heutzutage zunehmend zur Lösung verschiedener Teilaufgaben in der Navigation mobiler Roboter verwendet. In Rahmen dieser Aufgabe, des vielversprechenden Ansatzes Deep Learning und auf dem Anwendungsgebiet der Navigation von Raumfahrzeugen möchten wir Ihnen eine Reihe von Themen für Studien-, Diplom- und Masterarbeiten anbieten, vor allem:
-
Navigation mobiler Roboter vollständig basiert auf künstlichen neuronalen
Netzen (Diplomarbeit oder Masterarbeit)
Kurzbeschreibung: Z.Z. wird KI nur für Teilaufgaben in der Navigation benutzt, der Restwird konventionell realisiert. Die natürliche Intelligenz löst jedoch die
komplette Aufgabe mit neuronalen Netzen. Eine sehr gute Recherche und eine
Implementierung bzw. Inbetriebnahme einer vorhandenen vollständigen
KI-Lösung soll die Klarheit verschaffen, inwieweit es auch mit modernen
künstlichen Netzen möglich ist.
Beachte: Dieses Thema ist sehr anspruchsvoll und stellt besonders hohe Anforderungen!
Ansprechpartner:
Dr.-Ing. E. Dueblenk -
Evaluierung von eingebetteten Beschleunigern für künstliche neuronale
Netze (Studienarbeit, Diplomarbeit oder Masterarbeit)
Kurzbeschreibung: Die wichtigsten Fragenstellungen bei diesem Thema umfassen: Was kann man mit modernen USB-Boards mit YOLO11 machen? Welche Aufgaben? Welche Bildgröße? Welche Rechenzeiten? Spezielle Einschränkungen?Ansprechpartner:
Dr.-Ing. E. Dueblenk - weitere Themen folgen...
Voraussetzungen:
- Sehr gute Kenntnisse: in MATLAB/Simulink; in einem KI-Framework wie z.B. Tensorflow, PyTorch, MATLAB Deep Learning Toolbox; in Programmierung in Python, MATLAB, C, C++; in Programmierung unter Windows und Linux für PC und für eingebettete Rechner.