Feb 23, 2021
Flexible robotic structures based on dielectric elastomer actuators
Dielectric elastomer actuators (DEAs)
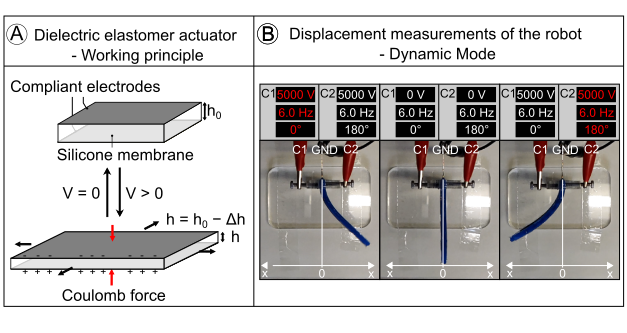
Dielectric elastomer actuators (DEAs) show promising properties to be used as artificial muscles in flexible robotic structures. For optimal force transmission, the dielectric elastomer membranes must be sufficiently pre-stretched. However, integrating the pre-stretched membranes into soft and elastic systems is challenging because the stored strain energy can significantly deform flexible elements. Franke et al. (Chair of Microsystems) developed a flexible robotic structure with an antagonistically working pair of artificial DEA muscles, which were stabilized by a bioinspired skeleton and allowed a defined bimorph bending curvature in both static and dynamic operation. Various experiments were used to demonstrate and optimize the influence of membrane pre-stretch as well as the stiffness of the robotic structure on static and dynamic bending displacement, resonant frequencies, and blocking forces. An analytical model based on the classical laminate theory was used to identify the main influencing parameters. The paper published in Frontiers Robotics and AI is a successful interdisciplinary collaboration between the Institute of Semiconductors and Microsystems (Prof. Richter, Chair of Microsystems), the Institute of Solid Mechanics (Prof. Wallmersperger, Chair of Mechanics of Multifunctional Structures) and the company PowerON Ltd. (Dr. Henke). Publication