SRau-Dyn – Drive simulation of crawler tracks
|
Full title: |
SRau-Dyn – Drive simulation of crawler tracks |
| Duration: |
01/2015 – 06/2017 |
|
Contributor: |
Dr.-Ing. Henry Graneß |
| Financing: | AiF / FDBI |
| Objective: |
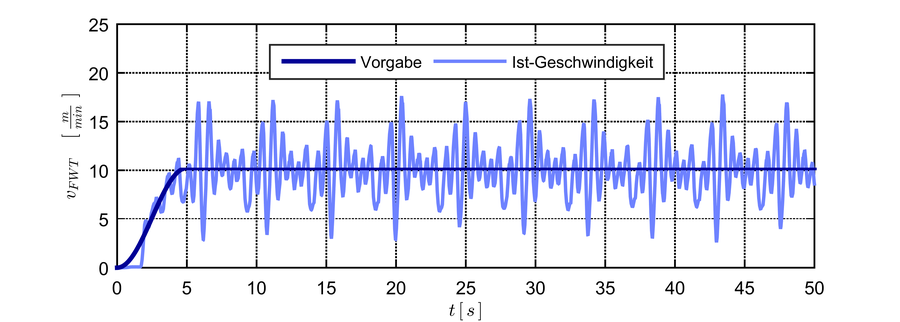
Crawlers for mobilisation of working machines in rough terrain realize considerably high propel power. Furthermore, even heavy vehicles cause only minor ground loading due to the wide contact patch of the crawler track plate. Typically, the driving speed of crawlers is low. Nevertheless, there is a significant speed droop during travel. The resulting vibrations and thus time variant loads eventuates in altered wear of the crawler’s components, as well as in damage of the travel gear drive and the superstructure of the vehicle. Goal of the research project is the minimisation of the intrinsic dynamic of the crawler track through the holistic view on the system. This shall be achieved with active (control engineering) as well as passive measurements (mechanical design). The results of the research project shall increase the service life of all drive and vehicle components and reduce wear of the crawler tracks as well as energy consumption. |
| Approach: |
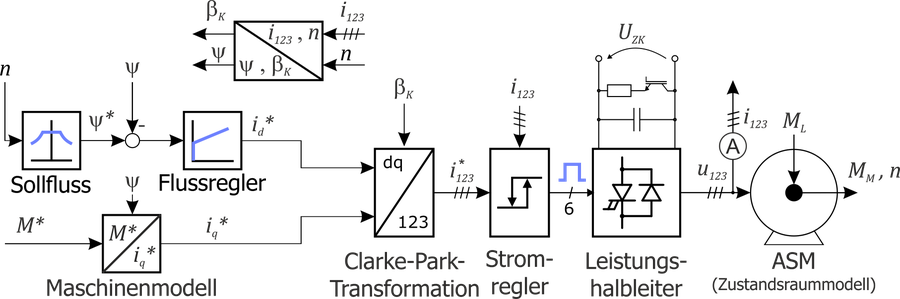
A holistic system analysis is carried out to achieve the research objective. This includes the separation of the dynamic behaviour of the caterpillar. This offers, besides a promoted understanding of the system behaviour, the benefit that broad variety of optimising measurements can be identified and examined. |
© IMM
© IMM

© IMM

© IMM

© IMM




