Model based calculation of the motion control for film packaging for high-speed pick-and-place applications – RoboBag
Robot systems are frequently used in modern machines and systems and will continue to be more and more widespread in the future. Especially under the pressure from growing machine flexibility and increasing networking (Industry 4.0) offer robot solutions due to their high generic applicability the possibility to implement new machine concepts and processes. A high degree of flexibility for gripping packages is provided by vacuum-based Elastomer suction cups, which are subject to certain application limits. This essentially result from the maximum path acceleration, which may lead to detachment of the packaging and thus leads to a reduction in output.
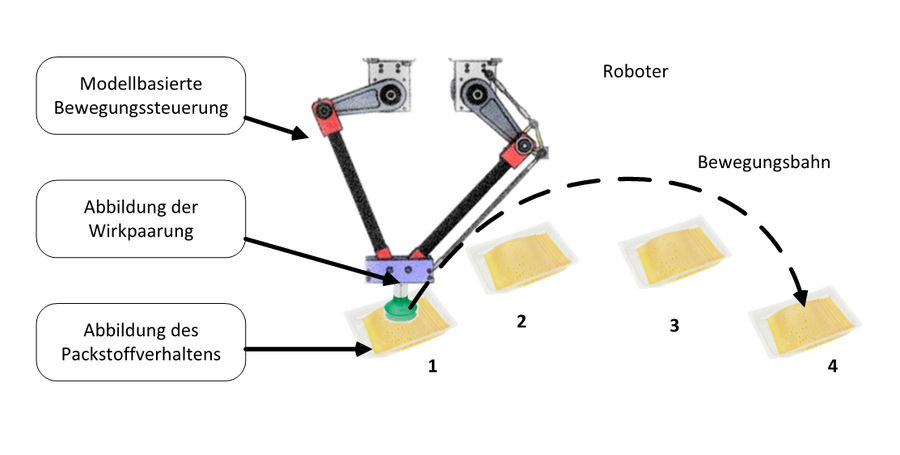
Against this background, machine builders and companies at packaging industry search for an answer to question of optimal movements of pick-and-place robots. Depending on varying types and shapes of packaging, the stochastic movement from the conveyor belt into the collective packaging and the movement of the product in the packaging, a reliable transport of the Package without failure of the action pairing between suction cup and package be guaranteed.
Pick-and-place robot
The research project intends to determine optimal robot paths for Pick-and-place applications taking into account the maximum permissible forces at the effective pairing between the suction cup and the packaging. In the orbital synthesis both the results of substitute tests and numerical simulation behaviour as well as the performance limits of the robot drives.
The aim of the project is on the one hand to shorten the commissioning time, and on the other hand to an increase in availability, resulting in an overall increase in the output of packaging plants is to be increased. The project is aimed in particular at SMEs, which rarely have access to personnel and have the material capacity to conduct extensive tests on the path design of a packaging machine on the specific product. Due to the numerical simulation and automatic path planning, a partly virtual commissioning, which reduces the time required for real commissioning and thus increasing its competitiveness compared to large corporations.
Project funding:


This research project is supported by the Industrievereinigung für Lebensmitteltechnologie und Verpackung e. V. (IVLV), the Arbeitsgemeinschaft industrieller Forschungsvereinigungen “Otto von Guericke” e. V. (AiF) and the Federal Ministry of Economic Affairs and Energy (IGF 20380 BR).
Project duration: 11/2019 – 10/2021
Project management and contact:
Project leader: Prof. Majschak
Project Team: Dipl.-Ing. Sascha Heisig, Dipl.-Ing. Yuchen Wu
Cooperations partner: Technische Universität Dresden, Institute of Solid Mechanics, Chair of Computational and Experimental solid mechanics