UAV-SRGK - Entwicklung eines Verfahrens zur automatisierten Fusion und Klassifikation von ALS- und UAV-Daten zur Erstellung von Starkre-gengefahrenkarten
Zunehmend extreme Wetterereignisse, hervorgerufen durch den Klimawandel, haben zu erheblichen menschlichen, ökologischen und wirtschaftlichen Schäden geführt. Rechtliche Bestimmungen wie das Hochwasserschutzgesetz II haben die Nachfrage nach Risikobewertungen für Oberflächenabflüsse erhöht und veranlassen Gemeinden und Planungsbüros, Hochwassergefahrenkarten zu nutzen, die auf digitalen Geländemodellen (DEM) basieren, die mittels luftgestützter Laserscanning (ALS) erstellt wurden. Die Intervalle zwischen den Scans verzögern jedoch die Aktualisierung städtischer Veränderungen, was zu unvollständigen Darstellungen von Strukturen führt, die die Abflusssimulationen beeinflussen. Unbemannte Luftfahrzeuge (UAVs) werden nun für detaillierte Luftaufnahmen genutzt, die cm-genau präzise UAV-basierte DEMs liefern, die für dicht besiedelte Regionen vorteilhaft sind. Die Integration dieser Daten in hydraulische Starkregensimulationen gestaltet sich aufgrund der erhöhten Details komplex und erfordert aufgrund von Hardware- und Softwarebeschränkungen eine manuelle Auswahl von Merkmalen. Trotz des Wertes der UAV-Daten behindern Verarbeitungskosten eine breite Einführung. Die Fusion von UAV-abgeleiteten DEMs mit bestehenden ALS-basierten DEMs birgt Herausforderungen und erfordert Techniken zur Zuordnung von Punktwolken mit unterschiedlichen Auflösungen. Die Integration von UAV-identifizierten Strukturen in Simulationsmodelle muss automatisiert erfolgen.
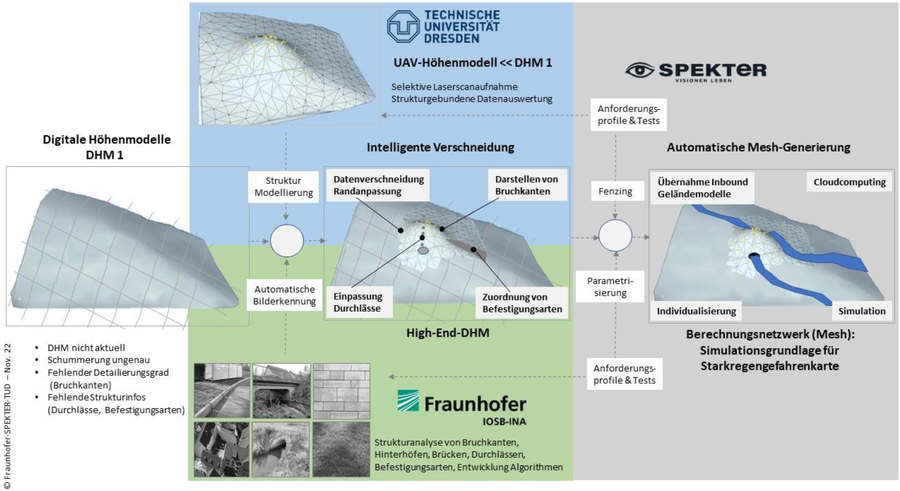
Dieses Projekt zielt darauf ab, beide DEM-Typen zu fusionieren, um Genauigkeit und Abdeckung für Abflusssimulationen zu verbessern. Es wird eine robuste Methode zur Zuordnung von Punktwolken sowie zur automatisierten Integration von mittels UAV-Daten identifizierten Strukturen entwickelt, um Gemeinden aktuelle und informative Starkregenrisikokarten zur Verfügung stellen zu können.
Kooperationspartner:
- SPEKTER GmbH
- Fraunhofer Gesellschaft e. V. Institut für Optronik, Systemtechnik und Bildauswertung (IOSB); Institutsteil für industrielle Automation (INA) des Fraunhofer IOSB
- Technische Universität Dresden; Institut für Photogrammetrie und Fernerkundung; Juniorprofessur für Geosensorsysteme
Gefördert durch: Dieses Projekt wird vom Bundesministerium für Wirtschaft und Energie (BMWE) aufgrund eines Beschlusses des Deutschen Bundestages gefördert.
