Miniature Connected, Cooperative and Automated Mobility Lab
Inhaltsverzeichnis
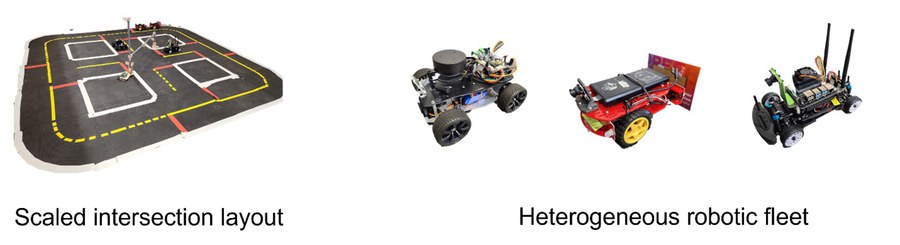
Herzlich Willkommen im Miniature Connected, Cooperative and Automated Mobility Laboratory (MiniCCAM Lab). Das MiniCCAM Lab steht an der Spitze der Verkehrsinnovation und nutzt eine heterogene Flotte von maßstabsgetreuen Roboterfahrzeugen, um reale Verkehrsszenarien nachzubilden. Es dient dazu, die Forschungslücke zwischen theoretischen Modellen, Simulationen und der Realität zu schließen, sodass Designlösungen und Steuerungsalgorithmen in einer sicheren und kontrollierten Umgebung getestet werden können, bevor sie im Feld implementiert werden. Die Forschungen von MiniCCAM Lab konzentrieren sich auf revolutionäre autonome und vernetzte Mobilitätssysteme.
MiniCCAM Lab Demo © VPA
Ziele
Erstellen einer hochrealistischen Forschungsumgebung: Das MiniCCAM Lab widmet sich der Erhöhung des Realität in der Verkehrsforschung, indem es effektiv die Lücke zwischen Simulation und Realität überbrückt.
Steigern des öffentlichen Verständnisses: Wir zielen darauf ab, das öffentliche Verständnis für Verkehrsprobleme und den Nutzen von vernetzten und autonomen Mobilitätslösungen zu verbessern, indem wir Einzelpersonen die Möglichkeit bieten, die Faktoren, die die Verkehrsdynamik besitzen, durch reale Roboterfahrzeuge hautnah zu erleben. Zusätzlich zu Theorien und Computersimulationen bieten wir die Möglichkeit, die Komplexität des Verkehrs durch praktische Demonstrationen zu veranschaulichen.
Verbessern der Lernerfahrung von Studierenden: Das MiniCCAM Lab ist verpflichtet, hochwertige Kurse für Studierende in diesem Bereich anzubieten. Unser Labor dient als Brücke zwischen Theorie und praktischer Anwendung und ermöglicht es den Studierenden, ihr grundlegendes Wissen in die Praxis umzusetzen. Es dient auch als dynamische Umgebung, in der Studierende Themen für wissenschaftliche Arbeiten im Bereich der autonomen Mobilität und vernetzter Systeme erkunden und innovative Verfahren und Methoden testen können.
Einrichten einer kollaborativen Umgebung: Das MiniCCAM Lab ist bestrebt, eine kollaborative Forschungsumgebung zu fördern. Unser Labor wird als offene Plattform betrieben, die Forschern aus verschiedenen Bereichen und Standorten ermöglicht, unsere Einrichtungen und Ressourcen zu nutzen.
Laborausstattung:
Ausstattung des Labors
Das MiniCCAM Lab wird kontinuierlich entwickelt und verfügt aktuell über folgende Ausstattung:
- Etwa 15 m2 großes, maßstabsgetreues Verkehrskreuzungslayout
- 9 Duckiebot DB19 Roboter von Duckietown in Betrieb
- Indoor Lokalisierungssystem
Die MiniCCAM plant, das Labor zukünftig mit folgender Ausrüstung zu verstärken:
- Roboterautos mit mehr Sensoren und Rechenleistung, z. B. Jetracer
- Vernetzter Fahrsimulator und VR/AR-Ausrüstung
- Konfigurierbares und dynamisches Layout basierend auf Landmark-Projektion
Lehrveranstaltung
Das MiniCCAM lab ist derzeit die Praktikumsplattform für die Lehrveranstaltung Rechentechnische Grundlagen und Werkzeuge der Verkehrsprozessautomatisierung. Sie können Details dazu im OPAL system finden.
Themenvorschläge für wissenschaftliche Arbeiten
Das MiniCCAM Lab bietet eine umfassende Plattform für die Durchführung von wissenschaftlichen Arbeiten aller Art, einschließlich Forschungspraktika, Studienarbeiten, Diplomarbeiten und Masterarbeiten. Unsere Einrichtungen sind eine ideale Plattform für Studierende, um vielfältige Forschungsthemen im Bereich der autonomen Mobilität und vernetzten Systeme zu erkunden.
Folgende Themen (aber keine Beschränkungen) sind im Labor willkommen:
- Vergleichsstudien zwischen verschiedenen bestehenden Methoden durch Implementierung in der MiniCCAM-Roboterflotte und im Management-System
- Innovative Steuerungsmethoden wie fahrspurfreie, schwarmbasierte Kreuzungsverwaltung
- Untersuchung der Auswirkungen von Latenz, Kommunikationsverzögerungen und Fehlern
- Einführung neuer Messgeräte oder Roboter ins Labor
Einige Themenangebote sind hier ausgeschrieben Hier und Sie können uns gerne mit Ihren eigenen Vorschlägen kontaktieren.
Forschungen mit MiniCCAM
Das MiniCCAM Lab steht für gemeinschaftliche Studien mit Forschern aus aller Welt offen. Für weitere Informationen können Sie sich an Prof. Dr. Meng Wang wenden.