Miniature Connected, Cooperative and Automated Mobility Lab
Table of contents
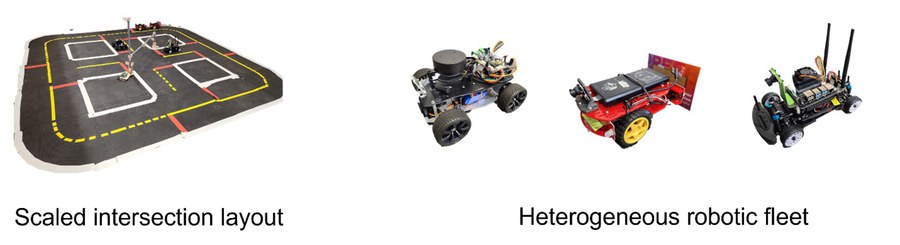
Welcome to the Miniature Connected, Cooperative and Automated Mobility Laboratory. MiniCCAM Lab is at the forefront of transportation innovation, utilizing a heterogeneous fleet of scaled robotic vehicles to replicate real traffic scenarios. It serves to bridge the gap between theoretical models, simulation and reality so that design solutions and control algorithms can be tested in a safe and controlled environment before field implementation. MiniCCAM's research focuses on revolutionary autonomous and networked mobility systems.
MiniCCAM Lab Demo © VPA
Objectives
Creating a High-Realism Research Environment: MiniCCAM is dedicated to elevating the realism of transportation research by effectively bridging the gap between simulation and reality.
Increasing Public Understanding: We aim to enhance public understanding of transportation problems and benefit of networked and autonomous mobility solutions by providing individuals with a firsthand experience of the factors shaping traffic dynamics. In addition to theories and computer simulation, we offer the opportunity for the general public to witness the intricacies of traffic in action through real-world robot vehicles.
Enhancing Student Learning Experience: MiniCCAM is committed to providing high-quality courses for students in the field. Our laboratory serves as a bridge between theory and practical application, allowing students to translate their foundational knowledge into real-world practice. It also serves as a dynamic environment where students can explore and develop thesis topics in the realm of autonomous mobility and networked systems and the testing of innovative procedures and methods.
Establishing a Collaborative Environment: MiniCCAM is committed to fostering a collaborative research environment. Our lab will operate as an open platform, facilitating researchers from various backgrounds and at different locations to leverage our facilities and resources.
Laboratory Equipment:
Ausstattung des Labors
The MiniCCAM lab is currently being developed, at this point the lab is equipped with
- About 15 m2 of scaled intersection layout
- 9 Duckietown's Duckiebot DB19 robots in operation
- Indoor localization system
The MiniCCAM plans to further introduce the following equipment in the lab:
- Robotics cars with more sensors and computational ability, e.g. Jetracer.
- Connected driving simulator and VR/AR equipment
- Configurable and dynamic layout based on landmark projection
Course
The MiniCCAM lab is currently the study platform of Computational basics and tools of traffic process automation, with the detailed descript in the OPAL system.
Thesis Opportunities
MiniCCAM Lab provides a comprehensive platform for conducting thesis projects of all kinds, including study theses, diploma theses, and master theses. Our facility is an ideal environment for students to explore diverse research topics within the field of autonomous mobility and networked systems.
The following topics (but not limited to) are welcomed in the lab:
- Comparative studies among different existed methods by implementing in the MINICCAM robotic fleet and management system
- Innovative control methods such as lane-free, swarm-based intersection management
- Studying the impact of latency, communication delay and errors
- Introducing new measuring devices or robots into the lab
Some topic offers are list here and you may contact us with your own proposals.
Research with MiniCCAM
The MiniCCAM is open for collaborative studies with researchers from all over the world. You may contact Prof. Dr. Meng Wang for more information.