Actuator technologies

The Chair of Acoustic and Haptic Engineering has long-term experience with electrodynamic, electrotactile, page motor, impact resonant, piezoelectric, electroactive polymer, and bending wave haptic actuators. Also, several technological solutions with electrotactile, electrodynamic, and electroactive polymer actuators for various applications such as touch screens, multimedia systems, automotive control panels, household appliances, and digital music interfaces have been developed.
Simulating tactile feedback apart from the basic vibratory feedback is one of the main concerns recently in the haptic field. Vibrotactile feedback has been widely used to transmit the basic vibration among game consoles and mobile phones up to recent developments. In the last years, vibrotactile feedback is also specifically been used to render textures apart from the other tactile feedback systems. Compared with other rendering methods, vibrotactile feedback can also create natural, intuitive, and rich information at a relatively low cost for tactile displays and teleoperation systems. The other texture rendering methods are discussed in detail under the Surface Haptics section. The individual effects of vibrotactile feedback definitely have a significant role in a tactile display. If the frequency is below 5 Hz, it is perceived as kinesthetic motion. From 10 to 60 Hz, it can be perceived as a motion or a beat. From 100 to 350 Hz, it can be sensed as a smooth vibration. As inspired by the current developments on vibrotactile feedback, we have gravitated towards to vibrotactile feedback to render fabric textures using an electrodynamic shaker.
Actuators for Vibrotactile Feedback
Vibrotactile actuators have a compact size and remarkable scalability, making them an excellent choice for many hardware designs with varying design requirements. In the realm of haptic technology, vibrotactile actuators are particularly desirable for wearable devices due to their ease of mounting on the human body. Some of the commonly utilized types of vibrotactile actuators are eccentric rotating mass (ERM) motors, linear resonant actuators (LRA), electroactive polymer (EAP) actuators, dielectric elastomer actuators (EDA), shape memory alloy (SMA) actuators, and piezoelectric actuators.
Electroactive polymer actuators consist of polymers that change shape or size when an electric field is applied. When they change shape or size, a vibration is created. These actuators provide a quite static actuation and they are small enough to assemble in small devices.
Dielectric elastomers actuators provide unique and interesting features for haptic applications. They offer promising benefits for acoustic applications due to their large achievable strain, high energy density, and small response time. This actuator was used in a new study at the chair, "Dielectric elastomer loudspeaker driver", to provide haptic tactile feedback.
Liquid dielectric actuators (HASEL actuators), in a compact form factor, can output relatively large amplitude, wideband vibrotactile feedback. The dynamic behavior and new control strategy of such type of actuator are currently under investigation at the chair.
Piezo technology is used in many areas of our everyday life. It is built into watches, miniature speakers, gyroscopes and many other devices. A new development is the application in haptics. Due to its high miniaturizability, it is possible to build small, lightweight vibration motors. Compared to conventional electrodynamic motors, piezoelectric motors have lower latency, lower energy consumption, and can achieve higher forces at the same time. In addition, they can be operated in a broad bandwidth, i.e., at varying frequencies. A disadvantage, however, is their rather low displacements. Nevertheless, the properties of piezo motors make them interesting for a wide range of haptic applications. For example, they could directly excite cell phone displays and thus reproduce surface textures or they can be integrated into textile wearables. They also hold great potential for use in integrated control elements. At the chair, we are therefore exploring new and useful fields of application for this exciting technology.
Contact
Mitarbeiter
NameMr M.Sc. Gangadhar Mamillapalli
Send encrypted email via the SecureMail portal (for TUD external users only).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 78 Helmholtzstraße 18
01062 Dresden
None
Force Feedback
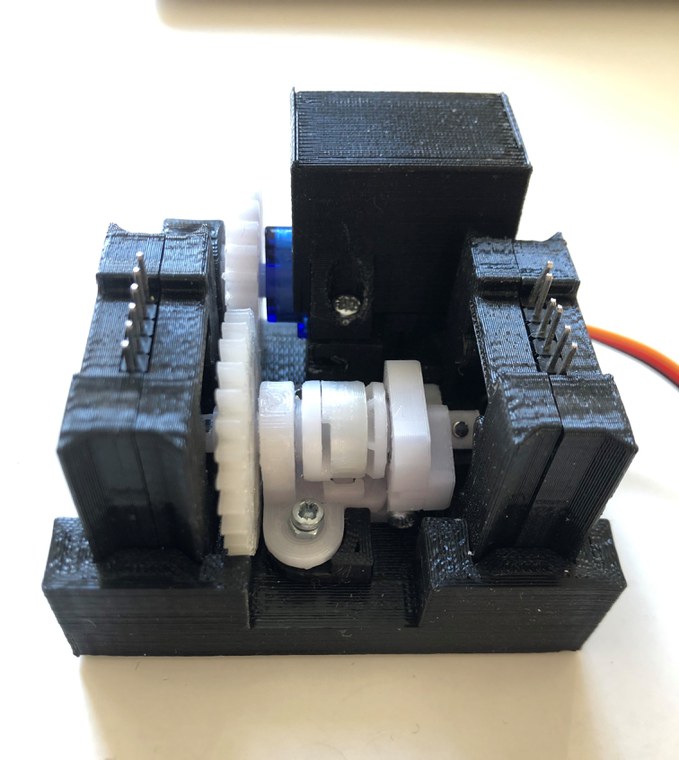
Bidirectional clutch mechanism prototype.
However, haptics is not only limited to vibrational feedback stimuli, but some applications require the implementation of force or kinaesthetic feedback, being especially practical its implementation in robotic teleoperation, virtual reality (VR) and augmented reality (AR). This type of feedback focuses on applying real forces to the skin and to the body, with the goal of affecting affect its motion. Its usual target in haptics are the hand and fingers, for recreating the interaction with real or virtual objects. The type of interaction may vary greatly from one object to another, being one of the challenges to be able to reproduce different objects, with different stiffnes e.g. holding a glass (highly rigid with no deformation) compared to holding a stress ball (soft and highly deformable). One of the research interests of our Chair focuses on developing actuation systems that may be applied for this purpose, with particular emphasis in wearable and portable systems. Although there are actuator and control systems able to perform such interaction, achieving it with a compact lightweight design presents its own challenges.
Another important aspect in kinaesthetic feedback systems is to include at the same time the capacity to allow free motion of the subject but to be able to apply force feedback when expected. It is part of our research to create novel mechanisms that enhance actuation systems, such as the bidirectional clutch shown in the picture below, able to add such feature to electromagnetic actuator (DC motors, servomotors).
Contact
Mitarbeiter
NameMr Pablo Alvarez Romeo Msc.
Send encrypted email via the SecureMail portal (for TUD external users only).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 57 Helmholtzstraße 18
01062 Dresden
None
2026
-
KinesCeTI: A Modular and Size-Adaptable Force Feedback Glove With Interchangeable Actuation for the Index and Thumb, 8 Apr 2026, In: IEEE Transactions on Haptics. 19, 2, 13 p.Electronic (full-text) versionResearch output: Contribution to journal > Research article
-
Sensors and actuators – new materials and technologies, 2026, Humans, Robots, and Virtual Worlds in the Tactile Internet. Fitzek, F. H., Li, S., Speidel, S., Strufe, T., Mahmoodi, T. & Reisslein, M. (eds.).p. 285-300, 16 p.Electronic (full-text) versionResearch output: Contribution to book/conference proceedings/anthology/report > Chapter in book/Anthology/Report
2022
-
Haptic Feedback to Improve Musical Interaction, 2022, p. 133-139Electronic (full-text) versionResearch output: Contribution to conferences > Paper
2021
-
Preliminary study of upper-body haptic feedback perception on cinematic experience, 1 Oct 2021, 2021 IEEE 23rd International Workshop on Multimedia Signal Processing (MMSP). p. 1-6Electronic (full-text) versionResearch output: Contribution to book/conference proceedings/anthology/report > Conference contribution
-
Groovuator – A haptic feedback system to improve musical interaction between a drummer and a bass guitar player, 1 Aug 2021, Proceedings of the German Annual Conference on Acoustics (DAGA). p. 860-863Electronic (full-text) versionResearch output: Contribution to book/conference proceedings/anthology/report > Conference contribution
-
Preliminary study of the influence of skin stretching in force perception, 1 Aug 2021, Proceedings of the German Annual Conference on Acoustics (DAGA). p. 1080-1083Electronic (full-text) versionResearch output: Contribution to book/conference proceedings/anthology/report > Conference contribution
-
Passively actuated clutch for enhanced backdrivability in bidirectional kinesthetic feedback applications, 1 Jul 2021, 2021 IEEE World Haptics Conference (WHC), Montreal, QC, Canada. p. 97-102, 6 p.Electronic (full-text) versionResearch output: Contribution to book/conference proceedings/anthology/report > Conference contribution
2020
-
Design of a bidirectional tendon-based actuation module for kinaesthetic finger feedback with a tendon length adjustment mechanism, 1 Sep 2020Research output: Contribution to conferences > Poster
-
Design of a bidirectional tendon-based actuation module for kinaesthetic finger feedback with a tendonlength adjustment mechanism, Sep 2020Research output: Contribution to conferences > Poster
-
Design and development of an actuation module with a tendon-based transmission for bidirectional force feedback on one finger joint, 1 Mar 2020, Fortschritte der Akustik - DAGA 2020 (50 Jahre DAGA): 46. Deutsche Jahrestagung für Akustik. p. 402-405Electronic (full-text) versionResearch output: Contribution to book/conference proceedings/anthology/report > Conference contribution