Haptische Interfaces
KinesCeTI Handschuh mit kinästhetischer Kraftrückmeldung
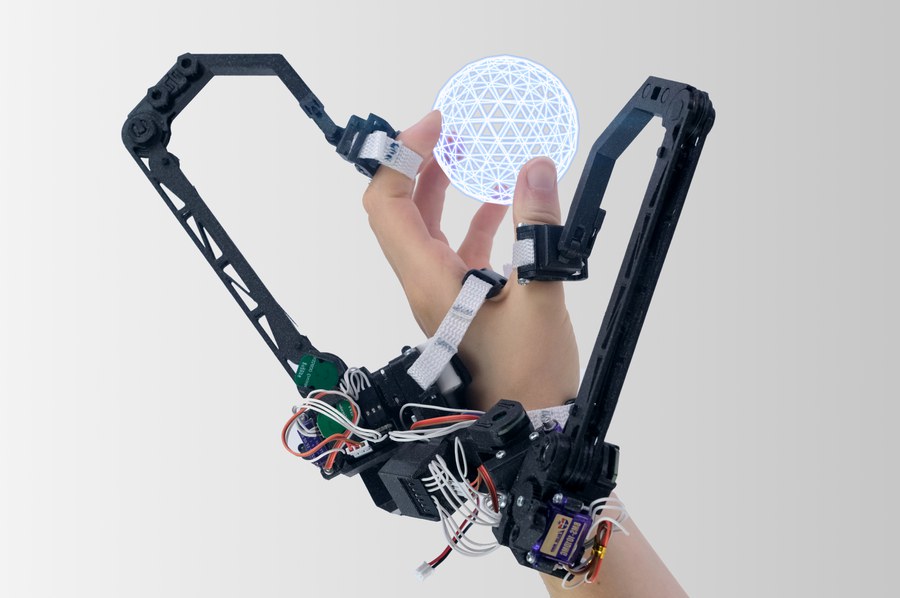
Force feedabck glove "KinesCeTI"
Obwohl die Haptik auf verschiedene Körperteile angewandt werden kann, ist der übliche Zielbereich für die Entwicklung neuer Schnittstellen die Hand, eines der wichtigsten Werkzeuge und sensorischen Teile des menschlichen Körpers. Es wurden bereits mehrere haptische Geräte für verschiedene Anwendungen entwickelt, die auf die Form und die Fähigkeiten der menschlichen Hand zugeschnitten sind, aber eine endgültige Lösung wurde noch nicht gefunden. Am Lehrstuhl für Akustik und Haptik werden mehrere Systeme und Entwürfe in dieser Hinsicht entwickelt. Eines davon ist KinesCeTI, ein Handschuh mit kinästhetischem Feedback, wie in der folgenden Abbildung gezeigt. Mit dem Fokus auf Zeige- und Daumenfinger wurde er nicht nur unter Berücksichtigung von Feedback, Bewegung und ergonomischen Anforderungen entwickelt, sondern auch unter dem Aspekt der Anpassung an verschiedene Nutzer und Gruppen, mit dem Ziel, ein kostengünstiges, aber robustes System zu entwickeln, das als universeller Kraftrückkopplungshandschuh verwendet werden kann.
Kontakt
Mitarbeiter
NameHerr Pablo Alvarez Romeo Msc.
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 57 Helmholtzstraße 18
01062 Dresden
None
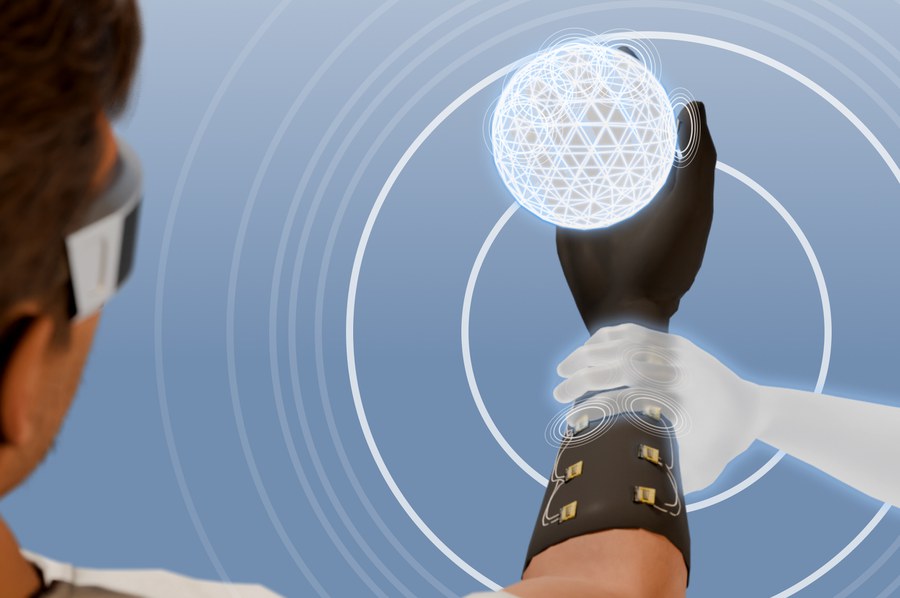
Affective Touch Transmission System

Haptic Armband Array
Affektive Berührungen sind ein wichtiger Teil des menschlichen Miteinanders. Bei Interaktionen im digitalen Raum, d.h. in Videotelefonaten, VR oder Homeschooling, fehlt diese Interaktionsmöglichkeit jedoch. Mit herkömmlichen Methoden ist eine technische Reproduktion von affektiven Berührungen limitiert. Für eine realitätsechte Wiedergabe wären hierfür aufwendige und damit sperrige und schwere Mechanismen nötig. Diese wären in der Anwendung mehr hinderlich als hilfreich. Um das Ziel einer Wiedergabe affektiver Berührungen dennoch zu erreichen, verfolgen wir einen anderen Ansatz. Anstatt die Berührung exakt wiederzugeben, ist unser Ziel lediglich die nötigen Aspekte der Berührung wiederzugeben, welche in der Wahrnehmung jedoch als eine Berührung interpretiert werden.
Um diese Idee zu verwirklichen, haben wir ein großflächiges haptisches Interface entwickelt. Dieses besteht aus einer speziellen Anordnung von Vibrationsmotoren, welche auf einem Armband angebracht sind. Mit Hilfe einer abgestimmten Ansteuerung der Motoren ist es uns möglich haptische Wahrnehmungsillusionen zu erzeugen. Trotz der ortsfesten Motoren hat man so das Gefühl, dass sich eine Vibration kontinuierlich über den Arm bewegt. Durch die von uns entwickelte Renderingstrategie mit geeigneter Manipulation der Ansteuerung ist es uns so möglich, verschiedenste Bewegungsmuster zu erzeugen. Auch die Muster affektiver Berührungen, wie zum Beispiel das Streichen mit der Hand über den Arm, können so erzeugt werden.
Über das Armband Interface lassen sich jedoch nicht nur Berührungen nachahmen. Die von den Aktoren aufgespannte Fläche ist ein hochauflösendes taktiles Display. Wir sind in der Lage einen empfundenen Vibrationspunkt an beliebiger Stelle auf dieser Fläche zu erzeugen und zu bewegen. Zusätzlich sind wir in der Lage auch die Wiedergabefrequenz in einem weiten Spektrum zu verändern. Dies ermöglicht viele weitere spannende und nützliche Anwendungen, wie beispielsweise eine Navigationshilfe für Menschen mit eingeschränkter Sicht, Musikanwendungen oder Hörunterstützungen. Durch die Echtzeitfähigkeit des Systems ist auch eine Anbindung an VR möglich, was wiederum eine ganze Bandbreite an weiteren Anwendungen ermöglicht.
Kontakt
Mitarbeiter
NameHerr Dipl.-Ing. Robert Kirchner
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 58 Helmholtzstraße 18
01062 Dresden
None
Soft Wearable Actuators as "Skin Interface"
Designer von tragbaren haptischen Geräten stehen immer wieder vor der Herausforderung, ein Gleichgewicht zwischen der Notwendigkeit, ein kräftiges, breitbandiges taktiles Feedback zu erzeugen, und dem Wunsch nach einem kompakten und leichten Gerät für optimale Tragbarkeit zu gewährleisten. Ein sperriges und schweres haptisches Gerät kann die Bewegungsfreiheit des Benutzers einschränken und zu Unbequemlichkeiten führen. Auf intelligenten Materialien basierende haptische Schnittstellen bieten eine potenzielle Lösung für dieses Dilemma, da sie ein hohes Leistungs-/Größenverhältnis aufweisen und somit ein angemessenes haptisches Feedback liefern können, während sie relativ klein und leicht bleiben. Hier am Lehrstuhl konzentrieren wir uns auf die Entwicklung von weichen haptischen Schnittstellen, die sich leicht an die Hautoberfläche anpassen. Unsere Schnittstellen haben einen dünnen Formfaktor, der eine größere Mobilität des Benutzers ermöglicht, und ihr geringes Gewicht trägt dazu bei, Ermüdungserscheinungen bei langfristiger Nutzung zu verringern. Unser Ziel ist es, das Gesamterlebnis des Nutzers zu verbessern, indem wir diese Schnittstellen in bestehende Anwendungen der Virtual und Augmented Reality integrieren.
Kontakt
Mitarbeiter
NameHerr M.Sc. Gangadhar Mamillapalli
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 78 Helmholtzstraße 18
01062 Dresden
None
Softness Display for e.g. Minimally Invasive or Robot Assisted Surgery

Bei der minimalinvasiven oder robotergestützten Chirurgie kann der Chirurg seine Hand nicht zur direkten Interaktion mit dem Gewebe verwenden. Dadurch entgehen ihm direkte haptische Hinweise zur intuitiven Unterscheidung der Weichheit des Gewebes oder der verursachten Gewebedeformation. Die Darstellung der sich ausdehnenden Kontaktfläche mit einem nachgiebigen Mechanismus stellt die intuitive haptische Empfindung einer direkten haptischen Interaktion wieder her und ermöglicht dem Chirurgen z.B. einen Tumoren im umliegenden Gewebe haptisch zu lokalisieren.
Kontakt
Mitarbeiter
NameHerr Ugur Alican Alma M.Sc.
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 58 Helmholtzstraße 18
01062 Dresden
None