Haptic Interfaces
Kinesthetic Force Feedback Glove
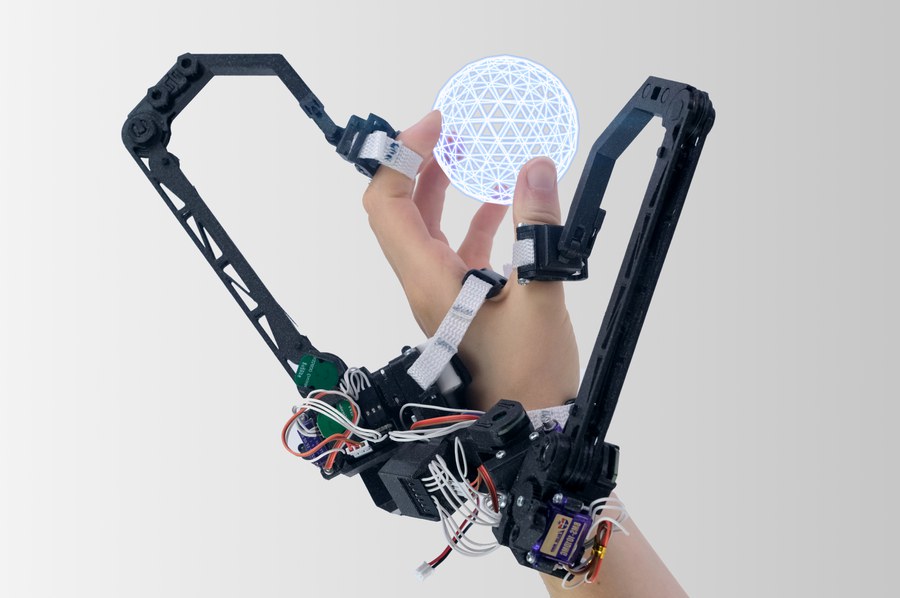
Force feedabck glove "KinesCeTI"
Although haptics may be applied to various parts of the body, the usual target area for novel interface development is the hand, one of the most relevant tools and sensory parts of the human body. Multiple haptic devices have been designed for various applications and tailored to the shape and capabilities of the human hand, but a final solution has not been reached yet. At the Chair of Acoustics and Haptics multiple systems and designs are being developed in this regard, being one of such KinesCeTI, a kinaesthetic feedback glove, shown in the figure below. With the focus on the index and the thumb fingers, it’s designed taking into consideration not only feedback, motion and ergonomic requirements, but also adaptation to different users and groups, aiming for a low-cost but robust system that may be used as a general purpose force feedback glove.
Contact
Mitarbeiter
NameMr Pablo Alvarez Romeo Msc.
Send encrypted email via the SecureMail portal (for TUD external users only).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 57 Helmholtzstraße 18
01062 Dresden
None
Affective Touch Transmission System

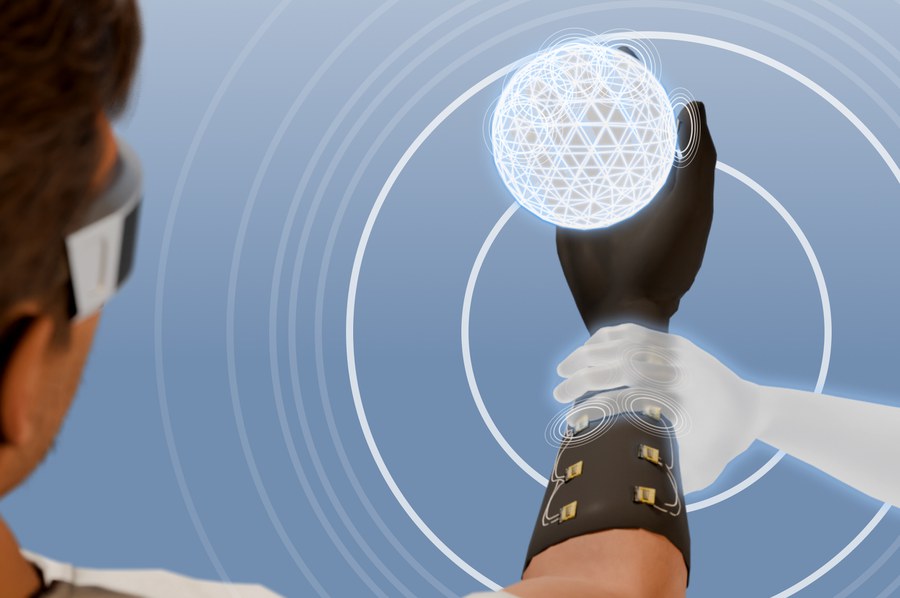
Haptic Armband Array
Social affective touch is an important part of human interaction. However, when interacting in the digital space, i.e. in video calls, VR or homeschooling, this possibility of interaction is missing. With conventional methods, a technical reproduction of affective touches is limited. For a realistic reproduction this would require elaborate and thus bulky and heavy mechanisms. These would be more obstructive than helpful in the application. In order to achieve the goal of reproducing affective touches, we follow a different approach. Instead of accurately reproducing the touch, our goal is merely to reproduce the necessary aspects of the touch, which, however, are interpreted as a touch in perception.
To make this idea a reality, we have developed a large-area haptic interface. This consists of a special arrangement of vibration motors, which are attached to an armband. With the help of a coordinated control of the motors, it is possible for us to create haptic perception illusions. Despite the fixed motors, one has the feeling that a vibration is continuously moving over the arm. Thanks to the rendering strategy developed by us with appropriate manipulation of the control, it is possible for us to create a wide variety of movement patterns. Likewise, the patterns of affective touch, such as stroking with the hand over the arm, can be created.
However, not only touch can be imitated via the armband interface. The surface spanned by the actuators is a high-resolution tactile display. We are able to create and move a perceived vibration point anywhere on this surface. In addition, we are also able to change the playback frequency in a wide spectrum. This enables many other exciting and useful applications, such as navigation aid for people with impaired vision, music applications or hearing aids. Due to the system’s real-time capability, it is also possible to connect it to VR, which in turn enables a whole range of further applications.
Contact
Mitarbeiter
NameMr Dipl.-Ing. Robert Kirchner
Send encrypted email via the SecureMail portal (for TUD external users only).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 58 Helmholtzstraße 18
01062 Dresden
None
Soft Wearable Actuators as "Skin Interface"
Wearable haptic designers face a persistent challenge in balancing the need for generating intense, wideband tactile feedback with the desire to maintain a compact and lightweight device for optimal wearability. A bulky and heavy haptic device can restrict the user's movement and result in discomfort. Smart material-based haptic interfaces offer a potential solution to this dilemma, as they possess a high power-to-size ratio, enabling them to provide adequate haptic feedback while remaining relatively small and light. Here at the chair, our focus is on innovating soft haptic interfaces that conform easily to the skin surface. Our interfaces have a thin form factor that enables greater user mobility, and their lightweight design helps to reduce fatigue during long-term usage. Our goal is to enhance the overall user experience by integrating these interfaces into existing virtual and augmented reality applications.
Contact
Mitarbeiter
NameMr M.Sc. Gangadhar Mamillapalli
Send encrypted email via the SecureMail portal (for TUD external users only).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 78 Helmholtzstraße 18
01062 Dresden
None
Softness Display for e.g. Minimally Invasive or Robot Assisted Surgery

In minimally invasive or robot assisted surgery the surgeon cannot use his hand for directling interacting with the tissue. This deprives him of direct haptic cues for intuitive discrimination of tissue softness or the caused tissue deformation. Rendering the contact area spread with a compliant mechanism recreates the intuitive haptic sensation of direct haptic interaction and enables the surgeon to e.g. haptically localize tumors in surrounding tissue.
Contact
Mitarbeiter
NameMr Ugur Alican Alma M.Sc.
Send encrypted email via the SecureMail portal (for TUD external users only).
Professur für Akustik und Haptik
Professur für Akustik und Haptik
Besucheradresse:
Barkhausenbau, Raum BAR 58 Helmholtzstraße 18
01062 Dresden
None