PyTrajectory
Ein Programmpaket zur Trajektorienberechnung auf Basis von Python.
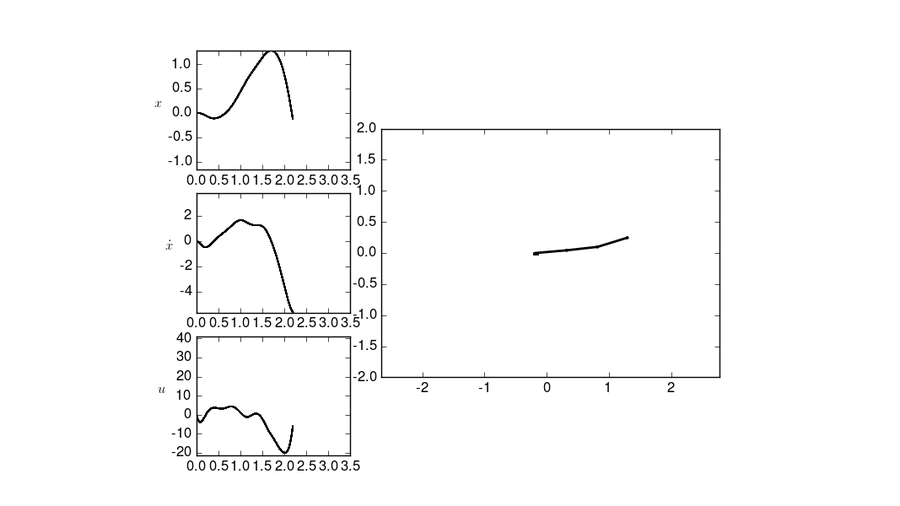
Betrachtet wird die Überführung eines i.A. nichtlinearen Systems von einem Anfangs- in einen (gewünschten) Endzustand. Zu bestimmen ist ein dazu geeigneter Verlauf der (ggf. mehrdimensionalen) Eingangsgröße. Das Problem wird als Randwertaufgabe (RWA) mit freien Parametern für die Eingangsgröße aufgefasst und mithilfe eines Kollokationsverfahrens gelöst. Dabei werden ggf. vorhandene Integratorketten explizit berücksichtigt, was zu einer numerisch günstigen Reduzierung der Dimension des Problems führt. Typische Rechenzeiten z.B. für das Aufschwingen des inversen Pendels liegen im Bereich von 10s.
- Quellcode: Repositorium bei github
- Dokumentation: https://pytrajectory.readthedocs.org
Ansprechpartner:
 © Carsten Knoll
© Carsten Knoll
Herr Dr.-Ing. Carsten Knoll
Wissenschaftlicher Mitarbeiter
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Zertifikat der DFN-PKI für verschlüsselte E-Mails.
SHA1 Fingerprint: 55:5E:7C:AB:FA:CE:99:18:E6:9C:DD:25:E1:A3:02:17:57:5C:E3:95
Institut für Regelungs- und Steuerungstheorie
Institut für Regelungs- und Steuerungstheorie
Besuchsadresse:
Institutsgebäude S7a, Etage 4, Raum 409 Georg-Schumann-Straße 7a
01187 Dresden