PyTrajectory
A Python package for the calculation of transition trajectories.
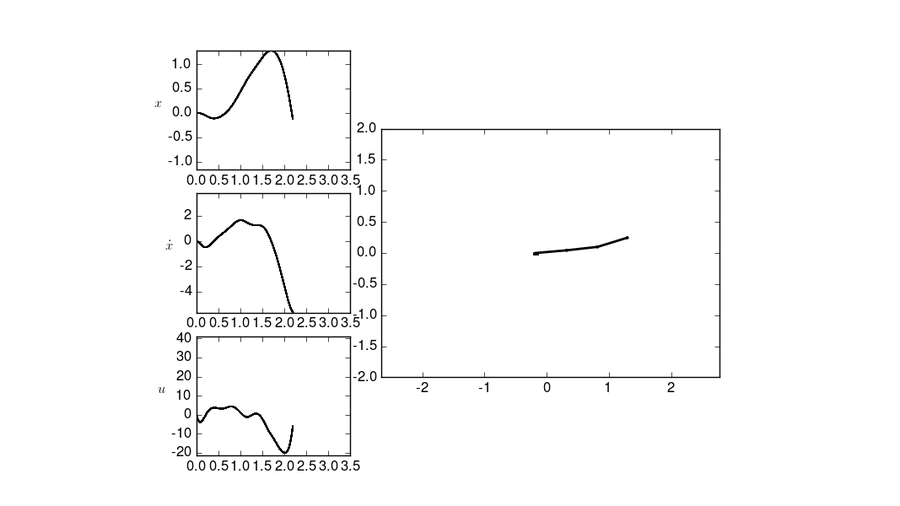
The considered problem is the transition of a (in general) nonlinear system from a given initial state to a desired final state. Therefore a suitable trajectory of the (in general multidimensional) input has to be determined. This setting is known as boundary value problem (bvp) with unknown parameters. The implemented solution approach relies on a collocation method. Optionally integrator chains can explicitly be considered, which for some systems, improves the numerical properties. Typical run times for the solution algorithm for the single pendulum swingup are about 10s.
- Source code: repository at github
- Documentation: https://pytrajectory.readthedocs.org
Contact:
 © Carsten Knoll
© Carsten Knoll
Mr Dr.-Ing. Carsten Knoll
Research and Teaching Fellow
Send encrypted email via the SecureMail portal (for TUD external users only).
Certificate of DFN-PKI for encrypted email communication.
SHA1 Fingerprint: 55:5E:7C:AB:FA:CE:99:18:E6:9C:DD:25:E1:A3:02:17:57:5C:E3:95
Institute of Control Theory
Institute of Control Theory
Visiting address:
Institutsgebäude S7a, Etage 4, Room 409 Georg-Schumann-Straße 7a
01187 Dresden