Promotionsprojekt 2: Simulationsgestützte Entwicklung Verstärkungstextilstrukturen für adaptive Elastomerverbunde mit mehrgliedrigen Festkörpergelenken
Inhaltsverzeichnis
Motivation
Die Realisierung mehrgelenkiger und räumlicher Bewegungen faserverstärkter Verbundbauteile erfordert die sequenzielle Anordnung von Festkörpergelenken mit verschiedenartigen Freiheitsgraden und vorgeformten Geometrien, die bistabile Zustände einnehmen können sowie komplexe Wirkmechanismen besitzen, z. B. Biege-Torsionskoppelglieder. Mittels integraler textiltechnologischer Fertigungstechniken können die dafür erforderliche anforderungsgerechte Positionierung von Verstärkungsfasern und Aktoren sowie die Integration von Leiterbahnen und Kontaktierung der Aktoren vorgenommen werden. Dabei kommt der Modellierung mittels Finite-Elemente-Methode die besondere Bedeutung zu, die Informationen zur erforderlichen Anordnung der Funktionskomponenten für die adressierten Wirkmechanismen bereitzustellen. Dafür ist ein Modellierungsansatz auf der Mesoskala erforderlich, der die Aktoren und die textilbasierte Verstärkungsstruktur berücksichtigt sowie die Abbildung dreidimensionaler Mechanismen ermöglicht.
Stand der Forschung und eigene Vorarbeiten
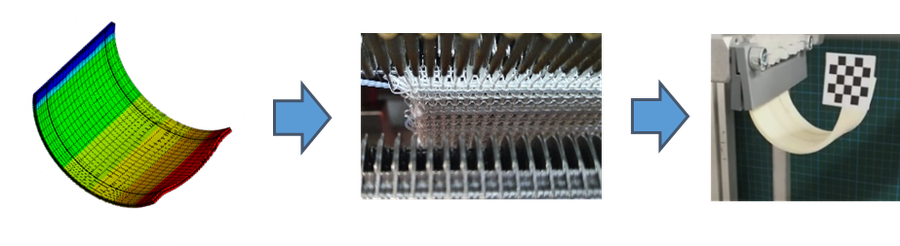
Weiche Elastomermatrices mit strukturintegrierten Aktoren ermöglichen große reversible Verformungen ohne zusätzliche externe Antriebe [1 – 5]. Dazu wurden in der 1. Kohorte umfassende Untersuchungen zu faserverstärkten Elastomerverbunden, bestehend aus einer Elastomermatrix mit Glasfaserverstärkung und integrierten textilverarbeitbaren Aktoren aus Nickel-Titan-Formgedächtnislegierung (FGL,) durchgeführt. Aufbauend auf den mittels thermomechanischer Charakterisierung ermittelten Materialdaten der Einzelkomponenten erfolgte die Erstellung von Simulationsmodellen auf der Mesoskala für zweidimensionale Verstärkungsstrukturen [6], die anhand von Parameterstudien konkrete Vorhersagen zum Bewegungsverhalten in der Ebene der Strukturen liefern und somit die Strukturauslegung für spezifische Bewegungsaufgaben ermöglichen, vgl. Abbildung. Auf dieser Basis erfolgte mittels Mehrlagenstricktechnik und Infiltrationsverfahren die schrittweise Herstellung von aktiv verformbaren Probekörpern, die durch definierte Aktivierung der integrierten Aktoren hinsichtlich ihres Verformungsverhaltens analysiert und zur Validierung der Simulationsmodelle verwendet wurden. Großer Forschungsbedarf besteht zur Auslegung und Entwicklung von textilen Aktorstrukturen für räumlich ausgeprägte sowie zeitlich gestaffelte Bewegungen.
Wissenschaftliche Fragestellung und Projektziele
Ziel des PP 2 der 2. Kohorte ist die Erforschung adaptiver Elastomerverbunde mit funktionsangepassten textilbasierten und -verarbeitbaren Aktoren hinsichtlich der Umsetzung dreidimensionaler Mechanismen, z. B. Biege-Torsionskopplung (2 Freiheitsgrade in einem Gelenkbereich), Realisierung mehrgelenkiger Strukturen (mind. 3 seriell angeordnete Gelenke in einer Struktur) und Nutzung bistabiler Zustände für schnelle Schaltvorgänge (> 10 Hz). Weiterhin soll die Integration von Leiterbahnen und die Kontaktierung der textilen Aktoren im textilen Prozess erfolgen. Basierend auf der Modellierung der Einzelkomponenten soll dabei ein robuster Modellierungsansatz auf der Mesoskala entwickelt und validiert werden, mit dem komplexe Mechanismen und 3D-Verformungsmuster dargestellt werden können, insbesondere auch bei Verwendung von alternativen Aktormaterialien neben den FGL, wie bspw. den in PP 1 untersuchten elektroaktiven Polymeren (EAP).
Literatur
| [1] | Kazemi Lari, M. A.; Dostine, A. D.; Zhang, J.; Wineman, A. S.; Shaw, J. A.: Robotic jellyfish actuated with a shape memory alloy spring. (2019), S. 2 f. |
| [2] | Wang, W.; Rodrigue, H.; Ahn, S.-H.: Deployable Soft Composite Structures. Scientific reports 6(2016), p. 20869 |
| [3] | Huang, X.; Kumar, K.; Jawed, M. K.; Mohammadi Nasab, A.; Ye, Z.; Shan, W.; Majidi, C.: Highly Dynamic Shape Memory Alloy Actuator for Fast Moving Soft Robots. Adv. Mater. Technol. 4(2019)4, S. 1800540 f. |
| [4] | Kim, H.-I.; Han, M.-W.; Song, S.-H.; Ahn, S.-H.: Soft morphing hand driven by SMA tendon wire. Composites Part B: Engineering 105(2016), S. 138-148 |
| [5] |
Lee, J.-H.; Chung, Y. S.; Rodrigue, H.: Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper. Scientific reports 9(2019)1, p. 11251 |
| [6] | Felix Lohse; Henriette Probst; Moniruddoza Ashir; Chokri Cherif; Rico Hickmann: Modeling of adaptive systems for interactive Fiber Rubber Composites. AUTEX 19th World Textile Conference 2019, |
Kontakt
Institut für Textilmaschinen und Textile Hochleistungswerkstofftechnik (ITM), Fakultät Maschinenwesen der TU Dresden
 © Christian Hüller
© Christian Hüller
Herr Univ.-Prof. Dr.-Ing. habil. Dipl.-Wirt. Ing. Chokri Cherif
Institutsdirektor und Inhaber der Professur für Textiltechnik
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Besucheranschrift:
Hohe Straße 6, Zimmer 138
01069 Dresden
None