Infratructure-Measurement-System for LRVs
Table of contents
|
Project |
Infrastructure measurement system for light rail vehicles |
|
Responsible |
since 2026: Dipl.-Ing. Vincent Voigtländer 2019 - 2023: Dipl.-Ing. (TUM) Maximilian Loderer 2013 - 2017: Dr.-Ing. Christian Telke |
|
Sponsor |
Alstom (formerly Bombardier Transportation) |
The development of trams, light rail vehicles and underground trains involves a number of recurring standard measurement tasks. Many of these measurement tasks must be carried out at a very early stage of the project or bidding phase. Particular focus is placed on the following variables:
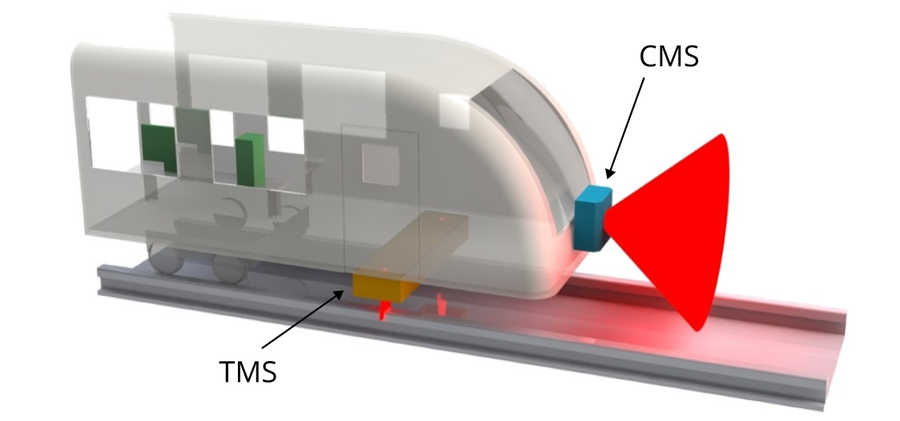
Carrier vehicle with TMS and CMS
- The track alignment, track irregularities and rail profiles, which have a significant influence on vehicle dynamics, comfort and wheel wear, and which can be used to generate load cases.
- The available clearance within the infrastructure, which limits the geometric dimensions of the train.
This research project aims to develop a modular sensor system that can be mounted onto existing vehicles and used to carry out the specified measurement tasks while the vehicles are in operation.
Track Measurement System - TMS
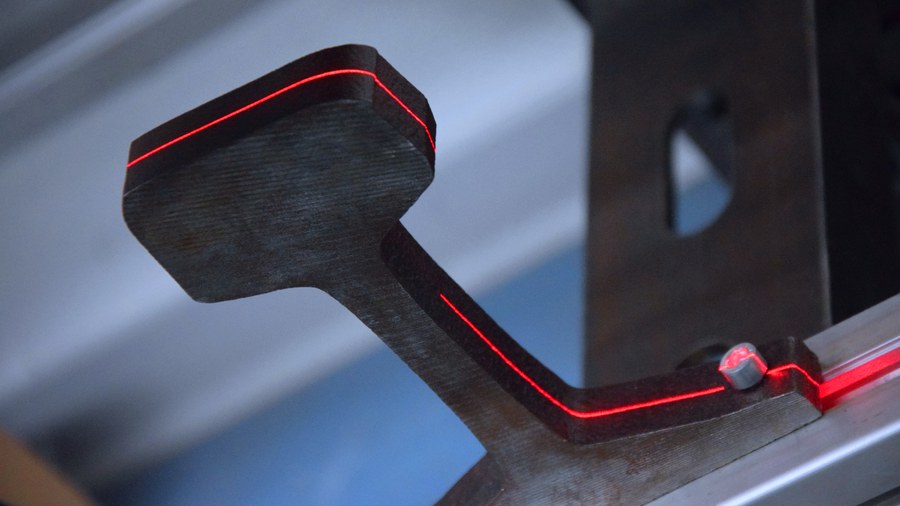
Laser profile scanner with rail
To generate load cases for simulation during the development of new vehicles, the track measurement system is used to determine the gauge, the horizontal and vertical curvature, and the superelevation of the track. In addition, the rail profiles are recorded so that the wear conditions can be used as input data for wheel-rail profile optimisation. The aforementioned parameters are captured using a sensor equipped with up to 12 laser profile scanners, which is mounted under the carrier vehicle and can measure the track whilst in motion. Key challenges lie in the limited installation space available, compatibility with different carrier vehicles, and the small curve radii typical of tram systems. These factors result in a large measurement area to be covered and, when measuring perpendicular to the vehicle's longitudinal axis, create a virtual track widening that must be corrected for in post-processing.
Clearance Measurement System - CMS
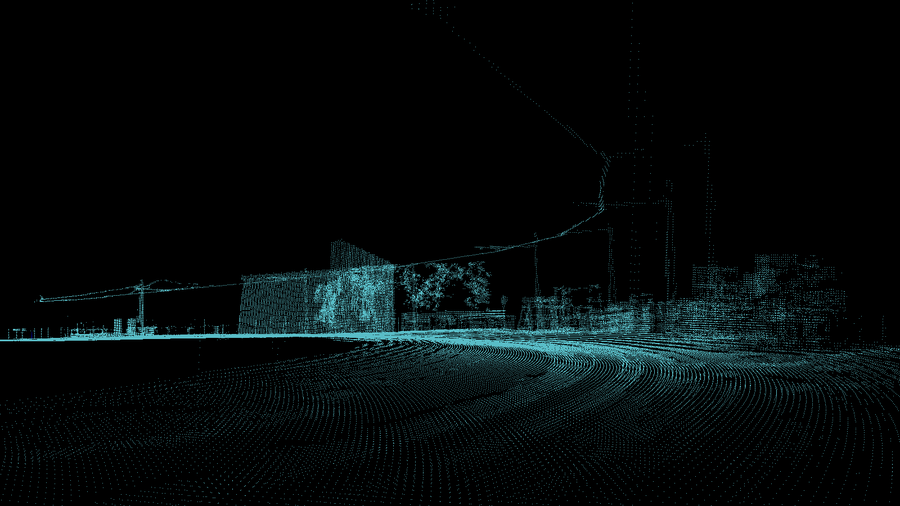
Point cloud of a surveyed infrastructure
To determine the largest possible dimensions of a new vehicle, it is necessary to measure the clearance profile across the entire rail network. To this end, LIDAR sensors are to be mounted at the front of the carrier vehicle, measuring the distances to neighbouring objects while the vehicle is in motion. A particular challenge in urban areas lies in the handling of small and dynamic objects. While numerous small objects such as railings or masts must not be overlooked when scanning the surroundings, dynamic objects, such as pedestrians, cars, cyclists or even leaves, must be computationally removed before the available clearance can be determined. Furthermore, to create the georeferenced clearance profile, the position of each measurement must be known with centimetre accuracy, even if positioning data from satellites is temporarily unavailable.