Kirigamibasierter Elektrostatischer Muskel
Kirigamibasierter Elektrostatischer Muskel
Hintergrund: Künstliche Muskeln, die auf elektrostatischem Zipping basieren, stellen eine vielversprechende Entwicklung im Bereich der Soft-Robotik und Aktortechnologie dar (Abb. 1A). Bei diesem Prinzip wird durch Anlegen einer elektrischen Spannung eine elektrostatische Anziehung zwischen zwei Elektroden erzeugt, die zu einem schrittweisen, reißverschlussartigen Zusammenziehen der Struktur führt – dem sogenannten "Zipping" (Abb. 1B). Dieser Mechanismus ermöglicht eine kontrollierte, flexible Bewegung mit hoher Effizienz und geringem Energieverbrauch, was ihn attraktiv für Anwendungen z.B. in der
Medizintechnik und biomimetischen Systemen macht. Kirigami ist eine japanische Papierkunst, bei der durch Falten und Schneiden aus einem einzigen Blatt Papier kunstvolle Muster oder Formen entstehen (Abb. 1C). Hierbei erlaubt Kirigami das gezielte Schneiden zur Gestaltung komplexer Designs.
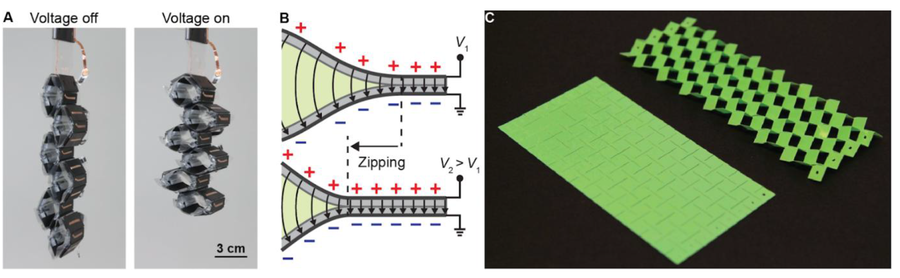
Abb. 1: A) Elektrostatischer künstlicher Muskel basierend auf elektrostatischem Zipping. B) Details des elektrostatischen Zippingprozesses. C) Beispiel für ein Kirigamidesign.
Aufgabenstellung 1 - Simulation
Im Rahmen einer studentischen Arbeit soll am Institut für Festkörpermechanik (IFKM) der TU Dresden in Zusammenarbeit mit dem Institut für Adaptive Mechanische Systeme der Universität Stuttgart ein Kirigami-Design für elektrostatische Muskeln mittels einer gekoppelten Mehrfeldformulierung basierend auf der Kontinuumsmechanik konzipiert und optimiert werden. Hierzu sind am IFKM folgende Arbeitspunkte durchzuführen:
- Literaturrecherche zu Kirigami-Designs und zu vorhandenen Modellen
- Auswahl bzw. Formulierung eines geeigneten Modells, das das Verhalten dieses elektrostatischen Muskels wiedergibt.
- Numerische Umsetzung des entwickelten Modells und Durchführung von numerischen Simulationen an einer Beispielkonfiguration.
- Ggf. Abgleich/Vergleich der numerisch ermittelten Ergebnisse mit den experimentellen Ergebnissen aus Stuttgart
- Ggf. numerische Designoptimierung
Voraussetzungen: Grundlagen der Festkörpermechanik (insbesondere die Fächer „Multifunktionale Strukturen“ und „Gekoppelte Probleme“)
Betreuende HSL: Prof. Dr.-Ing. habil. Thomas Wallmersperger, IFKM, TU Dresden
Jun.-Prof. Philipp Rothemund, Universität Stuttgart
Aufgabenstellung 2 - Design
Aufgabe: Im Rahmen einer studentischen Arbeit soll am Institut für Adaptive Mechanische Systeme der Universität Stuttgart in Zusammenarbeit mit dem Institut für Festkörpermechanik (IFKM) der TU Dresden ein Kirigami-Design für elektrostatische Muskeln entwickelt werden. Hierzu sind am IAMS (Stuttgart) folgende Arbeitspunkte durchzuführen:
- Literaturrecherche und Sammlung von Kirigami Designs
- Entwicklung einer Herstellungsmethode für Kirigamidesigns mit isolierten Elektroden
- Entwicklung einer Herstellungsmethode für kirigamibasierten Aktuatoren
- Experimentelle Charakterisierung der Kraft-Wegkuren der kirigamibasierten Aktuatoren.
- Ggf. Abgleich/Vergleich der experimentellen Ergebnisse mit den numerischen Ergebnissen aus Dresden
Betreuer: Jun.-Prof. Philipp Rothemund, Universität Stuttgart
Prof. Dr.-Ing. habil. Thomas Wallmersperger, IFKM, TU Dresden
Kontakt: Philipp Rothemund (philipp.rothemund@iams.uni-stuttgart.de)