BedienkonzeptTCP
Automatisierungsbaukasten zum Positionieren und Visualisieren des Tool Center Points (TCP) von Anbaugeräten mobiler Arbeitsmaschinen
| Finanzierung: | Zentrales Innovationsprogramm Mittelstand (ZIM) / AutoRobXL |
| Förderkennzeichen: | 16KN114220 |
| Partner: | Weiss Mobiltechnik GmbH |
| Laufzeit: | 10/24 – 09/26 |
| Kontakt: | Tom Volz |
Weltweit arbeiten zahlreiche Forschungseinrichtungen und Unternehmen an innovativen Automatisierungslösungen für mobile Arbeitsmaschinen, wie Bau-, Forst- und Landmaschinen. Die Entwicklung solcher Technologien konzentriert sich jedoch oft auf Maschinen mit hohen Stückzahlen, da kleinere und mittlere Unternehmen, die vorwiegend Sondermaschinen und Kleinserien fertigen, die hohen Entwicklungskosten für teilautomatisierte Funktionen oder Assistenzsysteme schwer refinanzieren können. Dennoch bietet die Automatisierung mobiles Maschinen signifikante Vorteile: Sie steigert die Produktivität, erhöht die Arbeitssicherheit und verbessert die Qualität sowie die Dokumentation von Prozessen.
Ein entscheidender Erfolgsfaktor für die Akzeptanz dieser Technologien ist jedoch die intuitive Bedienbarkeit der Maschinen. Automatisierte Funktionen müssen für die Bediener nachvollziehbar und effizient steuerbar sein, sodass sie Vertrauen in das Gesamtsystem entwickeln und eine positive User Experience entsteht.
Mit dem Forschungsprojekt wird ein innovativer, generischer Automatisierungsbaukasten entwickelt, der kleineren und mittleren Maschinenherstellern eine wirtschaftliche Umsetzung moderner Automatisierungs- und Assistenzsysteme ermöglicht. Der Baukasten umfasst verschiedene Schlüsseltechnologien wie kinematische Ansteuerung, Pfad- und Bewegungsplanung, standardisierte Kommunikationsschnittstellen sowie ein auf teilautomatisierte Maschinen zugeschnittenes, intuitives Human-Machine-Interface (HMI). Ziel ist es, eine schnelle und kosteneffiziente Entwicklung von Automatisierungslösungen zu ermöglichen.

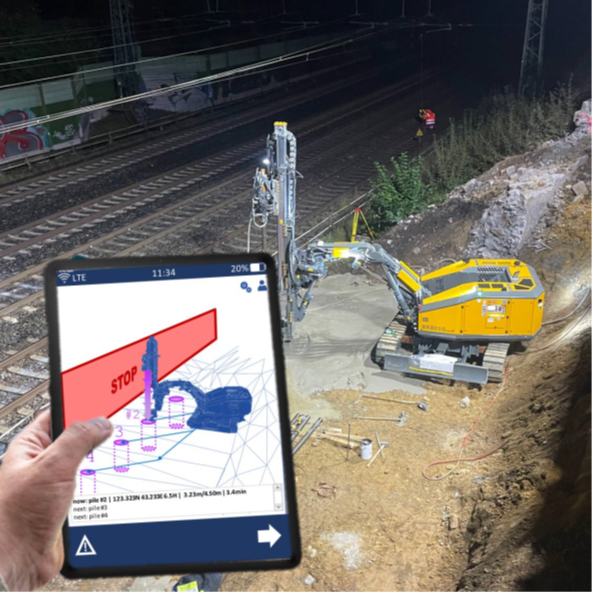
Am Beispiel einer Bohrraupe der Firma Morath wird dieser Ansatz praxisnah umgesetzt. Bohrraupen werden beispielsweise für Ankerbohrungen und Gründungspfähle eingesetzt und bislang manuell mittels Funkfernbedienung gesteuert. Dabei erfordert die Arbeitsvorbereitung ein hohes Maß an Erfahrung und Präzision, da die Lokalisierung der Bohrpunkte manuell erfolgt und zusätzliche Fachkräfte notwendig sind. Eine automatisierte Bohrraupe dagegen nutzt digitale Bohrpläne sowie Geländeaufmaße und fährt die Bohrlöcher eigenständig an, wobei der Bediener nur noch den Prozess überwacht.
Ein zentraler Schwerpunkt des Projekts liegt auf der Entwicklung eines automatisierungsorientierten HMIs, dass sich speziell an den Bedürfnissen teilautomatisierter Maschinen orientiert. Im Fokus stehen die Aspekte Sicherheit, Transparenz der automatisierten Bewegungen sowie eine klare Antizipation der nächsten Arbeitsschritte. Mit diesem Ansatz soll eine einfache, intuitive Bedienung ermöglicht werden, die sich deutlich von bisherigen HMI-Lösungen unterscheidet und die Nutzerakzeptanz in der Praxis erhöht. Es wird ein generischer Ansatz verfolgt der eine Übertragung auf andere Arbeitsmaschinen ohne hohen Entwicklungsaufwand ermöglicht.