OperatingconceptTCP
Automation kit for positioning and visualizing the Tool Center Point (TCP) of attachments for mobile machinery
| Funding: | Central Innovation Program for SMEs (ZIM) / AutoRobXL |
| Funding code: | 16KN114220 |
| Partner: | Weiss Mobiltechnik GmbH |
| Duration: | 10/24 - 09/26 |
| Contact: | Tom Volz |
Numerous research institutions and companies around the world are working on innovative automation solutions for mobile machinery such as construction, forestry and agricultural machinery. However, the development of such technologies is often concentrated on high-volume machines, as small and medium-sized companies, which mainly manufacture special machines and small series, find it difficult to refinance the high development costs for semi-automated functions or assistance systems. Nevertheless, the automation of mobile machines offers significant advantages: it increases productivity, enhances occupational safety and improves the quality and documentation of processes.
However, a decisive success factor for the acceptance of these technologies is the intuitive operability of the machines. Automated functions must be comprehensible and efficiently controllable for operators so that they develop trust in the overall system and a positive user experience is created.
The research project is developing an innovative, generic automation kit that enables small and medium-sized machine manufacturers to implement modern automation and assistance systems economically. The modular system includes various key technologies such as kinematic control, path and motion planning, standardized communication interfaces and an intuitive human-machine interface (HMI) tailored to semi-automated machines. The aim is to enable the rapid and cost-efficient development of automation solutions.

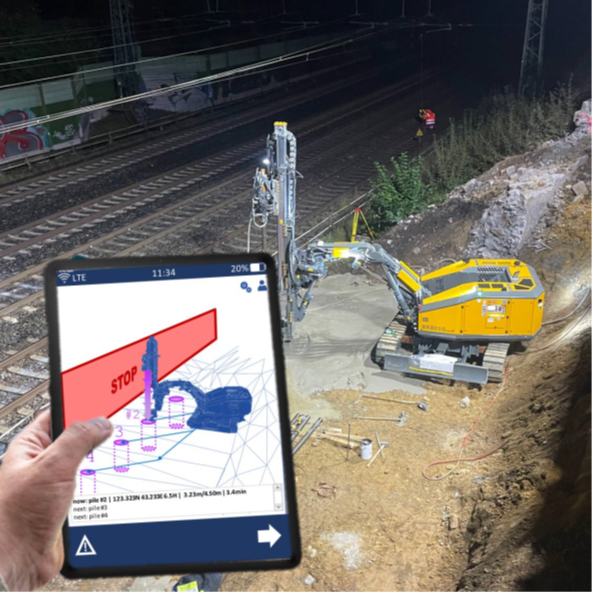
This approach is put into practice using the example of a Morath crawler drill. Crawler drills are used for anchor drilling and foundation piles, for example, and have so far been controlled manually by radio remote control. Work preparation requires a high degree of experience and precision, as the drilling points are localized manually and additional skilled workers are required. An automated drilling crawler, on the other hand, uses digital drilling plans and site surveys and approaches the boreholes independently, with the operator only monitoring the process.
A central focus of the project is the development of an automation-oriented HMI that is specifically geared towards the needs of semi-automated machines. The focus is on the aspects of safety, transparency of automated movements and clear anticipation of the next work steps. This approach is intended to enable simple, intuitive operation that differs significantly from previous HMI solutions and increases user acceptance in practice. A generic approach is pursued that enables transfer to other machines without high development costs.