G. Monkman: Dielectric behavior of magnetic hybrid materials
Description
3D printing was yesterday. Today 6D printing is necessary to produce the precise magnetoactive polymer devices needed for soft robotics [1]. With 6D printing, the usual 3D geometry can be augmented by a graded dispersion of magnetic particles within the polymer matrix. Not only layer by layer construction but also control of gradient and divergence makes particle distribution with 6 degrees of freedom possible.
Recent examples include the hybrid concatenation of magnetoactive polymers with soft and hard magnetic particles together with electrostatic layers such as piezoelectric polymers and electrets. An example of which is the magnetoactive electret which is capable of adhering to almost any material [2].
More complicated geometries include magnetoactive polymer tubes using mainly soft magnetic content, where it is desirable to include hard magnetic particles only at specific regions [3]. The additon of non-magnetic inclusions such as ferroelectric or electrically conducting particles may also be printed [4].
With the assistance of alternating and fixed magnetic fields, particles may be positioned and orientated as required. The addition of ultrasound also inhibits sedimentation before the polymer curing process is complete. Thermal control can also be used to accelerate or retard the curing process during 6D printing.
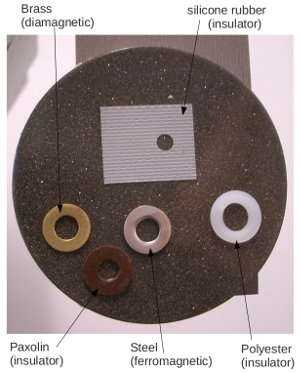
Magnetoactive electret demonstrating adhesion to ferromagnetic, diamagnetic, non-magnetic and electrically conducting and non-conducting materials
Project Manager
Prof. Dr. Gareth Monkman, OTH Regensburg
Staff
Dirk Sindersberger (Dipl.-Phys.), OTH Regensburg
Andreas Diermeier (M.Sc.), OTH Regensburg
Grant period
2013 -
Publications
[1] Zimmermann. K, V. Böhm, T. Kaufhold, J. Chavez Vega, T. Becker, S.
Odenbach, T. Gundermann, M. Schilling, M. Martens - Investigations and simulations on the mechanical behavior of magneto-sensitive elastomers in context with soft robotic gripper application. Problems in Mechanics - Scientific Journal of IFToMM, ISSN 1512-0740, 65, 4, pp. 13-26, 2016.
[2] Monkman, G.J., D. Sindersberger, A. Diermeier, & N. Prem - The Magnetoactive Electret - Smart Materials and Structures – IOP, accepted 11.05.2017.
[3] Diermeier. A, D. Sindersberger, G.J. Monkman - Magneto-active polymer actuator - Actuator'16, pp286-289, Bremen 2016.
[4] Prem. N & G.J. Monkman - Properties of Magnetoactive Polymers and Polydimethylsiloxane with Electroconductive Particles - ARC Conference 2017.
Contact
Prof. Dr. Gareth Monkman
Fakultät Elektro- und Informationstechnik
Mechatronic Research Unit
Seybothstraße 2
93053 Regensburg