Research focus
In addition to rotorcraft technology, the department is also increasingly working on wind turbine technology. The diagram on the right provides an overview of the strategic orientation and the research goals addressed.
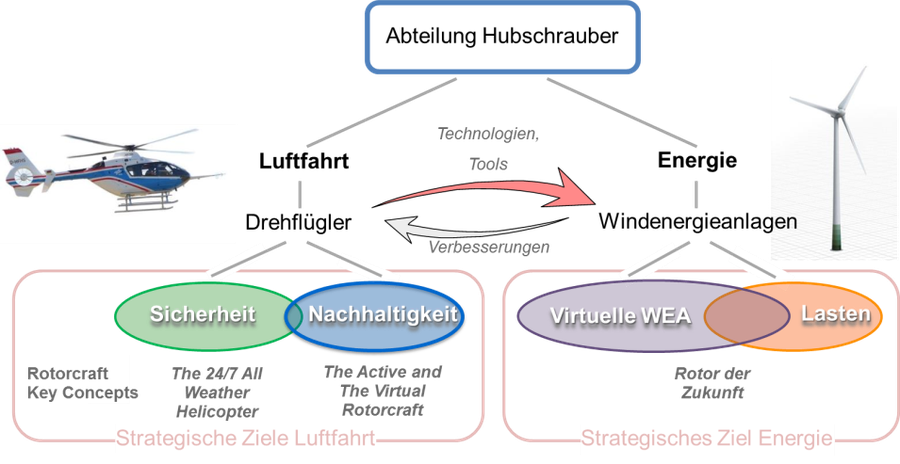
Main focus of the department's activities is research on rotorcraft. This also includes helicopters. Safety and sustainability are major goals of the departmental on rotorcraft. The flight of rotorcraft should be possible in all visibility and weather conditions, including icing conditions. Ultimately, this can mean fully automated flights from take-off to landing. The department contributes to sustainability through active systems for noise and power demand reduction. In addition, vibration reduction is another goal. Better and better simulation models are needed for the numerous tasks in rotorcraft research and development (keyword: Virtual Rotorcraft).
Such models are also transferred to wind turbines, but need to be adapted (Virtual Wind Turbine). However, rotorcraft research also benefits from improvements in this field. Prediction and reduction of loads through active control (individual Pitch Control) are subject of research in the field of wind turbines.
Table of contents
- Rotorcraft Research
- Physical-mathematical modelling of rotorcraft
- System identification of helicopters
- Flight controller optimization und pilot assistance
- Active sidesticks for pilot support
- Coupling and degradation scenarios of active sidesticks
- Preliminary design of rotorcraft
- De-Icing
- Active rotor control
- Ship deck landing
- Air-to-Air Refueling
- Field of wind turbines
- Rotorcraft Research
Rotorcraft Research
Physical-mathematical modelling of rotorcraft
Helicopters, like rotorcraft in general, are very complex systems that even today can only be simulated with insufficient accuracy. The main rotor, for example, generates a wake that interacts with the fuselage structure and causes vibration problems at the tail unit. Conversely, the fuselage influences the flow through the rotor, rotor and fuselage dynamics can interact and result in self-excited vibrations. Loads still cannot be predicted accurately enough. The goal is therefore to build a simulation software for helicopters that can perform accurate, but also fast calculations. This extends to real-time capability. In addition, interfaces with numerical flow solvers will be provided.
System identification of helicopters
In addition to the physical-mathematical modelling of helicopters, the methods of system identification are also used to derive simulation models from flight test data. These models are usually linear and are used, among other things, to evaluate handling qualities and optimize controllers. For this purpose, standardized inputs are controlled by the pilot and the helicopter reactions are recorded. A special procedure, which can be applied in the frequency or time domain, than determines the transfer functions between inputs and outputs. For this purpose, parameters of previously defined model structures can be identified or the entire model structure including parameters can be derived.
Flight controller optimization und pilot assistance
As helicopters are difficult to fly, flight controllers are used to relieve the pilot. The first application is to stabilize the helicopter. Then, more advanced functions can be realized to further simplify flying. Such functions comprise e.g. controllers for commanding and holding a certain attitude, a translational speed or holding a hover position. Pilot assistance systems then aim to further relieve the pilot. Obstacle-free flight path optimization based on sensor data fusion and control of the helicopter to stay on the flight path and automatic avoidance of obstacles might be such an assistance system. Other assistance systems support the pilot during external load transport missions (slung load damping and positioning).
Active sidesticks for pilot support
A special form of human-machine interface is the use of the hand's sense of touch. This highly sensitive organ is currently not yet used for communication with the pilot; initial approaches can be found in the automotive sector. Active sidesticks are mechatronic systems that can replace conventional helicopter controls and provide force feedback to the pilot. The "force-displacement" characteristic of the sticks can be changed almost in real time during flight. The helicopter flight envelope is restricted by many limitations which the pilot has to be aware of. Some of the limitations have to be monitored on instruments. At the same time, he has to keep eyes on his surroundings to observe air traffic and obstacles. Therefore, one helpful alternative would be to use active sticks for informing him e.g. about envelope violations (keyword: envelope protection). In addition, active sticks can be utilized to implement new types of assistance systems, e.g. for flying certain maneuvers. They also significantly improve the ergonomics of the pilot's sitting posture.
Coupling and degradation scenarios of active sidesticks
Classical helicopter control sticks with mechanical flight control system are mechanically coupled to each other. The use of active sticks replaces this by an electronic coupling. This opens up new possibilities for how the controls are coupled, either by simulating mechanical control or by not coupling the sticks at all. Coupling of sticks helps the non-controlling pilot to get a better situational awareness of the controlled inputs of the flying pilot, which is especially important in situations where the non-controlling pilot has to take over control. Decoupling of both sticks must then be done very carefully in such situations. This can be done manually or automatically.
Active sticks can continue to provide control even in the event of failure of individual components such as the motor, force sensor or position sensor by reconfiguration. Two extreme situations are a sudden switch to force control when the stick is blocked (the stick can no longer be moved) or a failure scenario in which the stick's feeling of control force is lost and the stick becomes "force free". Here it is important to investigate how pilots cope with stick degradation, especially if it occurs in critical flight situations.
Preliminary design of rotorcraft
The range of configurations for rotorcraft is much wider than for fixed-wing aircraft, for which almost a single variant has become established in the civil sector. For helicopters, configurations with one main rotor can already be distinguished from those with several rotors and multi-rotor variants in the arrangement of the rotors. More recently, the design space has been expanded almost indefinitely by electric propulsion in the field of rotorcraft, which have a large number of electrically driven propellers instead of rotors (eVTOL). In some cases, wings and separate propulsion devices are also added to achieve higher speeds of flight. This design diversity must be mapped in design tools in order to create "optimal" configurations for predefined missions.
De-Icing
While de-icing systems have found their way into large helicopters, this is not the case for light to medium helicopters. This is explained by the weight and power requirements of such systems. However, this also means that a rescue helicopter today cannot move out in icing conditions despite good visibility. Therefore, this research area will pay special attention to alternative de-icing systems that use little energy or even use energy that is already abundant in the form of heat.
Active rotor control
Active rotor control aims to control signals in the rotating rotor in addition to the pilot, without the assistance of the pilot. For this purpose, additional actuators are usually installed in the rotating rotor. This is known as Individual Blade Control (IBC). Such systems are very good at reducing vibrations already in the rotor (the rotor is origin of most of the vibrations), the noise radiated by the rotor and its power requirements. IBC has been successfully tested in many wind tunnel and flight test campaigns. However, the question of the most efficient IBC system is still open. DLR is currently researching two concepts, the multiple swashplate, which is the only IBC system that does not require actuators in the rotor, and the "Smart Twisting Active Rotor" (STAR), which makes use of piezo foil actuators which are integrated into the upper and lower blade skin.
Ship deck landing
Landing of helicopters on ship decks is challenging for several reasons. The limited landing area is obvious. Such ship decks can move considerably depending on the sea state. Less obvious, but equally problematic, are the additional aerodynamic interactions of the helicopter with the wake of the ship's structures, which can certainly lead to significant adverse effects on the helicopter. The first step for research in this field is to implement the entire chain in DLR’s AVES simulator center and, building on this, to develop assistance systems that simplify the landing of the helicopter on moving ship decks.
Air-to-Air Refueling
In air-to-air refueling, the pilot has to hit a refueling hose extended from a tanker aircraft with a long filling nozzle, which is stabilized by a small basket at its end. This flight task places the highest demands on the pilot's precision. Air-to-Air Refueling becomes more difficult by the wake of the tanker’s engines/propellers and the wing impinging on helicopter and basket. The latter in particular can make considerable movements. The pilot must follow the basket’s motion with the nozzle, taking care to steer in only moderate control commands. Here, too, the first step is to integrate the chain of effects in the AVES simulator center and develop assistance systems that support the pilot in this task or relieve him entirely.
Field of wind turbines
Modelling of wind turbines
In this topic, the model approaches provided for rotorcraft are transferred to wind turbines. Presently, a so-called free wake method, which is a vortex lattice method and which calculates the freely forming wake geometry of a thrust-generating rotor at each time step, is being adapted for this purpose. This requires, for example, to adopt the free wake method to the turbulent inflow, which is rarely modelled for helicopters, or the interaction with the wakes of other wind turbines. This will allow a simulation of entire wind farms.
Research into new wind turbine configurations
For this purpose, multirotor concepts are being investigated. The idea here is not to develop ever larger rotors in order to achieve ever higher power yields, but to integrate several rotors on a common tower structure. One question here is how close the rotors can be arranged next to each other or even overlap in order to reduce the costs of the tower structure without having a significant negative impact on the power yield.
Active load control
For this research area, new control methods are being investigated in order to reduce loads, e.g. at the rotor blade or the tower structure, by intervening in the system control. For this purpose, additional blade pitch angles are to be commanded at the rotor blade by a load controller, in order to achieve the desired results. Since the movement of the entire blade at its root causes high power requirement, a more advanced idea is to integrate new control mechanisms into the blade. These could be trailing edge flaps, for example, to take advantage of the high dynamic pressure prevailing on the outer areas of the blade. Such a concept leads to MIMO control (multiple input, multiple output), which allows to address several control targets simultaneously. Both, using innovative control methods and technical system issues are subject of research in this area.