Verbesserte Planung der Ladevorgänge von Mobilen Robotern
Projektkoordination & -leitung
Herr Prof. Dr. rer. pol. habil. Thorsten Claus;
Herr Prof. Dr.-Ing. habil. Thorsten Schmidt;
Herr Prof. Dr. rer. pol. Enrico Teich (Berufsakademie Sachsen - Staatliche Studienakademie Dresden)
Projektdurchführung
Herr Dipl.-Ing. Maximilian Dilefeld
Zeitraum:
01.04.2023 bis 31.03.2029
Kurzbeschreibung:
Mobile Roboter haben sich zu einem wichtigen Bestandteil der Intralogistik etabliert. Ein wesentliches Argument für den Einsatz dieser Systeme ist Ihre Flexibilität in Bezug auf ein schwankendes Transportaufgebot sowie Anpassbarkeit bei sich ändernden Rahmenbedingungen.
Zur Steuerung von AGVs (Automated Guided Vehicle) und AMRs (Autonomous Mobile Robot) müssen eine Reihe von Planungsproblemen in der Leitsteuerung (Flottenmanager) gelöst werden. Die Materialflusssteuerung (häufig extern z.B. MES) muss Quellen und Senken für die Verknüpfung von Transportaufträgen auswählen. Aufträge, die im Fall von AMRs über den reinen Produkttransport hinausgehen können, müssen in der Auftragsverwaltung gesammelt und sortiert werden. Die Fahrzeugdisposition prüft, welche Fahrzeuge einen Auftrag ausführen können, und muss das am besten geeignete auswählen. Die Fahrzeugzustände werden überwacht und Ladevorgänge sowie Fahrten zu Wartepositionen, wenn keine Aufträge verfügbar sind, müssen eigenverantwortlich geplant werden. In der Auftragsabwicklung werden Aufträge in kleinere Aufgaben aufgeteilt, welche an die Fahrzeuge gesendet und von diesen abgearbeitet werden können. Ein wesentlicher Bestandteil der Fahrauftragsabwicklung ist die Navigation zur Auswahl der optimalen Route und Vermeidung von Fahrzeugbegegnungen.
Da dieses System, eine mobile Stromversorgung nutzt, ist die Verfügbarkeit der einzelnen Fahrzeuge und in Folge der ganzen Flotte stark von der Ladestrategie abhängig. Das Projekt ersetzt die praxisüblichen starren Ladegrenzen durch ein intelligentes Entscheidungssystem, welches direkt in die Auftragszuweisung integriert ist. Ziel des Projekts ist ein effizienterer Einsatz der Ressource Strom sowie insbesondere in Szenarien mit großer Auslastungsschwankung eine bessere Verfügbarkeit zu erreichen.
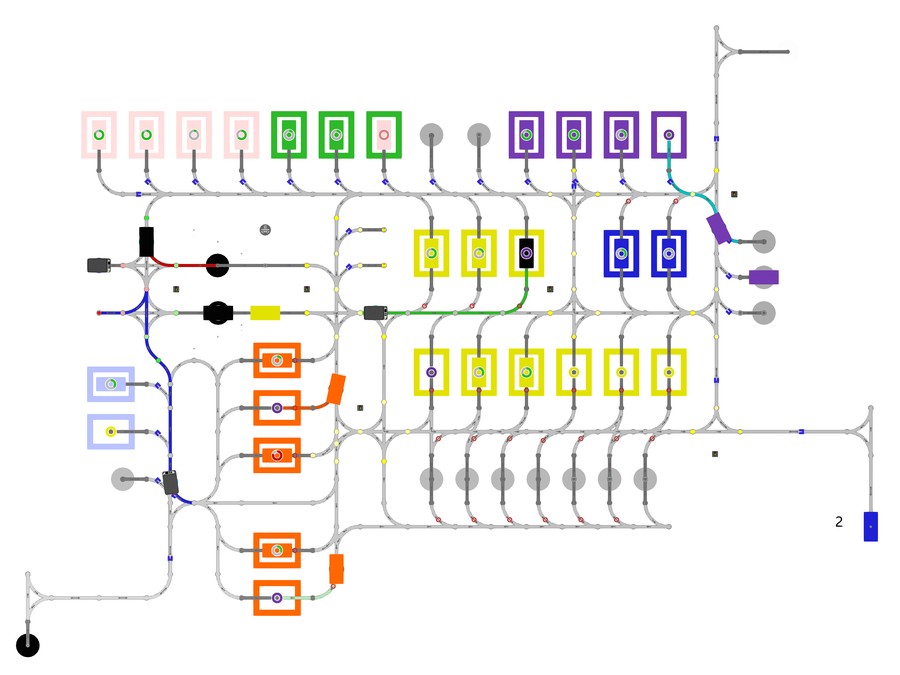
Konkret werden Strategien in einer Simulationslösung der DUALIS GmbH IT Solution unter Nutzung der 3D-Simulationsumgebung Visual Components implementiert und validiert. Anhand einer praxisnahmen Anwendung einer Nachbereitungsanlage für lackierte Fahrzeugkarossen wurden Defizite durch das gleichzeitige Laden von Fahrzeugen in Situationen hoher Nachfrage nachgewiesen. Der implementierte Auktionsalgorithmus verbindet die Planungsprobleme Auftragszuweisung und Lademanagement unter Berücksichtigung nicht nur der individuellen Ladestände, sondern des Gesamtzustands im System sowie der aktuellen Transportnachfrage, wodurch eine Reduzierung der notwendigen Flottengröße ermöglicht wurde. Die Ergebnisse sowie der Algorithmus wurden in einem Journalbeitrag im Logistics Research vorgestellt. Zudem wurde eine Übersicht von Ansätzen mit ähnlicher Zielstellung aus der Literatur auf der 39. ECMS International Conference on Modelling and Simulation in Catania sowie eine zusätzliche Fallstudie zum Einsatz von AMRs in der Blechproduktion auf der 21. ASIM Fachtagung "Simulation in Produktion und Logistik" in Dresden präsentiert.