Research Areas
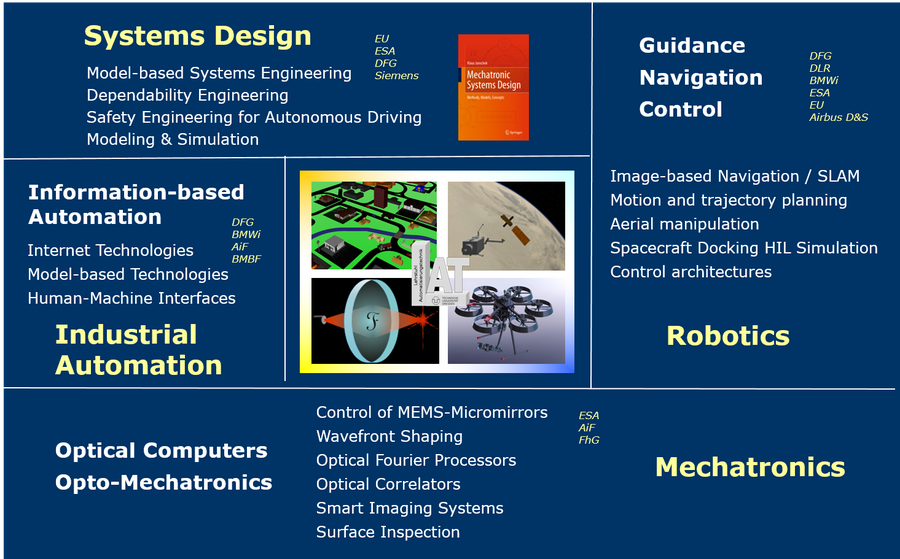
| SYSTEMS DESIGN |
| ROBOTICS |
| MECHATRONICS |
| INDUSTRIAL AUTOMATION |
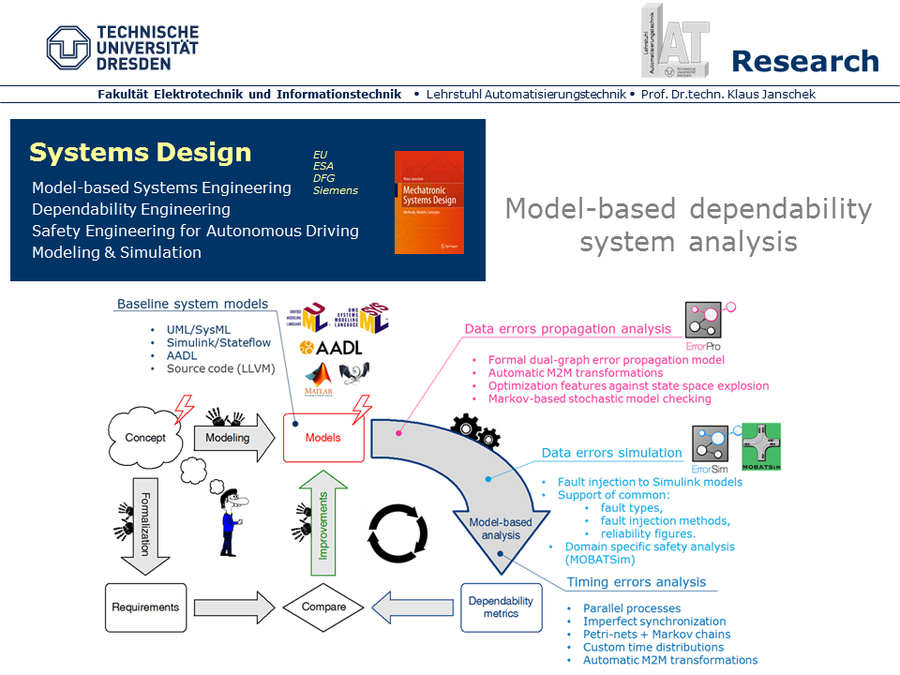
Research Area - SYSTEMS DESIGN
The research area Systems Design deals with questions of model-based design of heterogeneous complex technical systems for automation, robotics and mechatronics. The aim is the derivation of reliable metrics for performance and behavioral properties at early stage of development on the basis of abstract system models. The current work focuses on the modeling, analysis and verification of dependability properties (RAMS - Reliability, Availability, Maintainability, Safety) using state-of-the art system models (UML-SysML, AADL, Matlab/Simulink).
Achievements
- System-level model-based stochastic analysis of error propagation;
- System modeling paradigms supported: UML, SySML, Matlab/Simulink, AADL, Source Code (LLVM);
- Automatic model transformation;
- DFG / EU / ESA funding.

Selected Publications
| Morozov, A., Janschek, K.: Probabilistic Error Propagation Model for Mechatronic Systems. Mechatronics (Elsevier), Volume 24, Issue 8, 2014, pp. 1189 - 1202. |
|
Janschek, K., Morozov, A.: |
|
Ding, K., Mutzke, Th., Morozov, A., Janschek,K.: |
|
Morozov, A., Janschek, K.: |
|
Ding, K., Morozov, A., Janschek, K.: |
|
Morozov, A., Ding, K., Chen, T., Janschek, K.: |
|
Saraoglu, M., Morozov, A., Soylemez, T., Janschek, K.: |
|
Morozov, A.; Zhou, Y.; Janschek, K.: |
| Ding, K., Morozov, A., Janschek, K.: MORE: Model-based redundancy for Simulink. In International Conference on Computer Safety, Reliability, and Security, pp. 250-264, Springer, 2018. |
|
Ding, K., Morozov, A., Janschek, K.: |
| Ding, K., Morozov, A., Janschek, K.: Efficient Model-level Reliability Analysis of Simulink Models. 38th International Conference on Computer Safety, Reliability and Security, SAFECOMP 2019. Lecture Notes in Computer Science, vol 11698. Springer, Cham. https://doi.org/10.1007/978-3-030-26601-1_10 |
| Morozov, A., Ding, K., Steurer, M., Janschek, K.: OpenErrorPro: A New Tool for Stochastic Model-based Reliability and Resilience Analysis. 2019 IEEE 30th International Symposium on Software Reliability Engineering (ISSRE), Berlin, Germany, 2019, pp. 303-312, doi: 10.1109/ISSRE.2019.00038. |
Achievements
- Failure and fault detection for heterogeneous systems using data-driven artificial intelligence (AI) methods, e.g. deep learning, convolutional neuronal networks;
- State / DAAD / Bundesanstalt für Arbeitsschutz und Arbeitsmedizin funding, industry cooperation.

--> PDF Download
Selected Publications
|
Beyer, M., Schorn, Chr., Fabarisov, T., Morozov, A. Janschek, K.: |
| Fabarisov, T., Morozov, A., Mamaev, I., Janschek., K.: Deep Learning-Based Error Mitigation for Assistive Exoskeleton With Computational-Resource-Limited Platform and Edge Tensor Processing Unit. ASME - IMECE 2021 International Mechanical Engineering Congress & Exposition, Virtual Conference: November 1 – 5, 2021, --Accepted Paper IMECE2021-70387-- |
| Beyer, M., Morozov, A., Valiev, E., Schorn, Chr., Gauerhof, L., Ding, K., Janschek, K.: Fault Injectors for TensorFlow: Evaluation of the Impact of Random Hardware Faults on Deep CNNs. 30th European Safety and Reliability Conference (ESREL). Venice, Italy, 2020. https://www.rpsonline.com.sg/proceedings/esrel2020/html/5754.xml |
|
Ding, Sh., Morozov, A., Vock, S., Weyrich, M., Janschek, K.: |
|
Moradi, M., Oakes, B.J., Saraoglu, M., Morozov, A., Janschek, K., Denil, J.: |
|
Beyer, M., Morozov, A., Ding, K., Ding, Sh., Janschek, K.: |
|
Ding, K., Ding, Sh., Morozov, A., Fabarisov, T., Janschek, K.: |
Achievements
-
New research line since 2017;
-
Safety oriented analysis, design and simulation of control and traffic planning algorithms for autonomous cars;
-
State funding.

--> pdf as download
Selected Publications
| Saraoğlu, M., Jiang, H., Schirmer, M., Mutlu, I., Janschek, K.: A Minimax-Based Decision-Making Approach for Safe Maneuver Planning in Automated Driving. 2023 American Control Conference (ACC), San Diego, CA, USA, 2023, pp. 4683-4690, doi: 10.23919/ACC55779.2023.10156286. |
| Saraoglu M., Pintscher J., Janschek K.: Designing a Safe Intersection Management Algorithm using Formal Methods. IFAC-PapersOnLine, Volume 55, Issue 14, 2022, Pages 22-27, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2022.07.577 |
| Yang, Q., Shi, Q., Saraoglu, M., Janschek, K.: A Hybrid Approach using an Adaptive Waypoint Generator for Lane-changing Maneuver on Curved Roads. In: Bargende M., Reuss HC., Wagner A. (eds) 21. Internationales Stuttgarter Symposium, 2021. Proceedings. Springer Vieweg, Wiesbaden, pp 127-141, https://link.springer.com/chapter/10.1007/978-3-658-33521-2_10 |
|
Saraoğlu, M., Shi, Q., Morozov, A., Janschek, K.: |
|
Hart, F., Saraoglu, M., Morozov, A., Janschek, K.: |
| Saraoglu, M., Morozov, A., Janschek, K.: MOBATSim: MOdel-Based Autonomous Traffic Simulation Framework for Fault-Error-Failure Chain Analysis. IAV2019, 10th IFAC Symposium on Intelligent Autonomous Vehicles, IFAC-PapersOnLine, Volume 52, Issue 8, 2019, Pages 239-244, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2019.08.077 |
|
Saraoglu, M., Morozov, A., Janschek, K.: |
|
Saraoğlu, M.; Hart, F.; Morozov, A.; Janschek, K.: |
Achievements
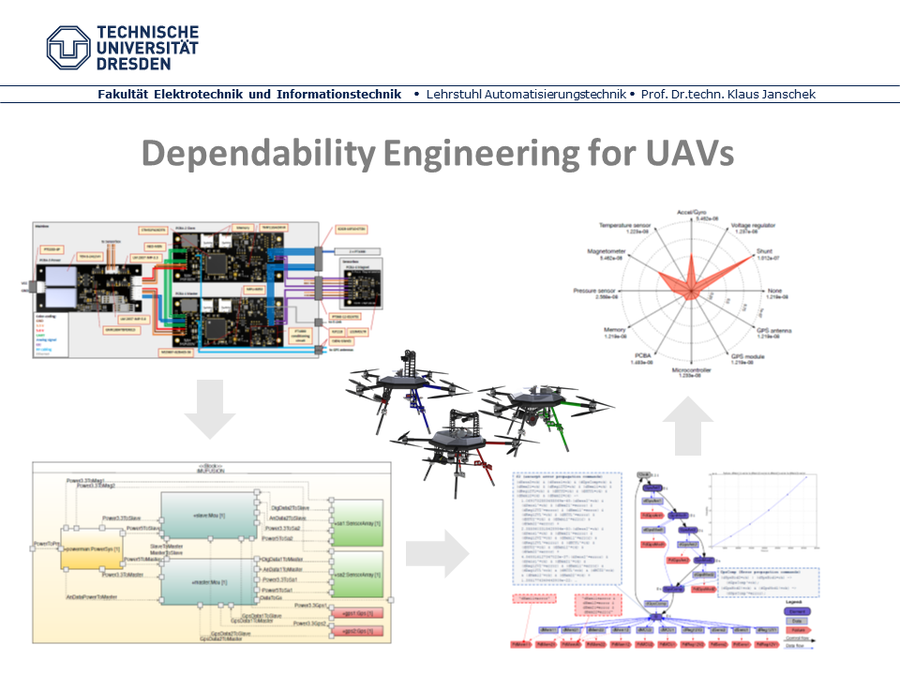
- Holistic model-based approach to dependability assessment;
- SysML-based Profile for Dependable UAV Design;
- Combination of stochastic timing and data error propagation analysis;
- Phase-specific requirements definition;
- State funding; cooperation with Hochschule Nordhausen.
Selected Publications
| Morozov, A., Diaconeasa, M.A., Steurer, M.: A hybrid methodology for model based probabilistic resilience evaluation of dynamic systems. Proceedings of the ASME 2020 International Mechanical Engineering Congress and Exposition. Volume 14: Safety Engineering, Risk, and Reliability Analysis. Virtual, Online. November 16–19, 2020. V014T14A024. ASME. https://doi.org/10.1115/IMECE2020-23789 |
| Steurer, M., Mutzke, Th., Morozov, A., Janschek. K., Neitzke, K.P.: Utilizing Model-based Timing Analysis for Holistic Dependability Assessment of Unmanned Aerial Vehicle. 30th European Safety and Reliability Conference (ESREL). Venice, Italy, 2020. https://www.rpsonline.com.sg/proceedings/esrel2020/html/5757.xml |
| Steurer, M., Morozov, A., Janschek, K., Neitzke, K.P.: Model-Based Dependability Assessment of Phased-Mission Unmanned Aerial Vehicles. IFAC-PapersOnLine, Volume 53, Issue 2, 2020, Pages 8915-8922, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2020.12.1416 |
| Mutzke, Th., Steurer, M., Morozov, A., Janschek, K.: Model-based Analysis of Timing Errors for Reliable UAV Design. 30th European Safety and Reliability Conference (ESREL). Venice, Italy, 2020. https://www.rpsonline.com.sg/proceedings/esrel2020/html/5414.xml |
| Steurer, M., Morozov, A., Janschek, K., Neitzke, K.P.: Model-Based Dependability Assessment of Phased-Mission Unmanned Aerial Vehicles. IFAC-PapersOnLine, Volume 53, Issue 2, 2020, Pages 8915-8922, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2020.12.1416 |
|
Steurer, M.; Morozov, A.; Janschek, K.; Neitzke, K.: |
Achievements
- Stochastic system level model-based analysis of propagation of timing errors
- Automated analysis framework
- System modelling paradigms: UM/, SySML
- Industry funding (Siemens Healtineers)

Selected Publications
| Mutzke, Th., Steurer, M., Morozov, A., Janschek, K.: Model-based Analysis of Timing Errors for Reliable UAV Design. 30th European Safety and Reliability Conference (ESREL). Venice, Italy, 2020. https://www.rpsonline.com.sg/proceedings/esrel2020/html/5414.xml |
| Steurer, M., Mutzke, Th., Morozov, A., Janschek. K., Neitzke, K.P.: Utilizing Model-based Timing Analysis for Holistic Dependability Assessment of Unmanned Aerial Vehicle. 30th European Safety and Reliability Conference (ESREL). Venice, Italy, 2020. https://www.rpsonline.com.sg/proceedings/esrel2020/html/5757.xml |
|
Morozov, A.; Mutzke, T.; Ren, B.; Janschek, K.: |
| Mutzke, T.; Morozov, A.; Ding, K.; Janschek, K.; Braun, J.: Stochastic Model-based Analysis of Timing Errors for Mechatronic Systems with User-defined General Discrete-time Distributions. 10th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Warsaw, Poland, 2018. IFAC-PapersOnLine, Volume 51, Issue 24, 2018, Pages 1417-1424. |
| Mutzke, T.; Morozov, A.; Janschek, K.: Verification of Timing Properties of a Medical Patient Table Case Study Using Probabilistic Model Checking. Proceedings of ESREL 2018, June 17-21, Trondheim, Norway, 2018, Chapter 320, pp. 2547-2554. |
| Ding, K., Mutzke, Th., Morozov, A., Janschek, K.: Automatic Transformation of UML System Models for Model-Based Error Propagation Analysis of Mechatronic Systems. IFAC-PapersOnLine, Volume 49, Issue 21, 2016, Pages 439-446. |
| Mutzke, Th., Ding, Kai, Morozov, A., Janschek, K., Braun, J.: Model-based Analysis of Timing Errors for Reliable Design of Mechatronic Medical Devices. In: Proceedings of 3rd Conference on Control and Fault-Tolerant Systems (SysTol 2016), Barcelona, Spain, Sept. 7-9, 2016, pp. 233-238. |
Achievements
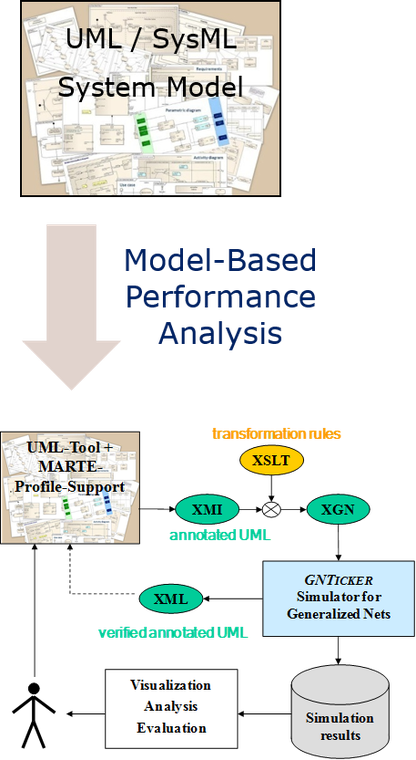
- Methods and CAE tools for system level performance analysis of heterogeneous systems (mechatronic, automated);
- State funding.
Selected Publications
|
Koycheva, Evelina: |
|
Koycheva, E., Janschek, K.: |
|
Koycheva, E., Janschek, K.: |
Research Area - ROBOTICS
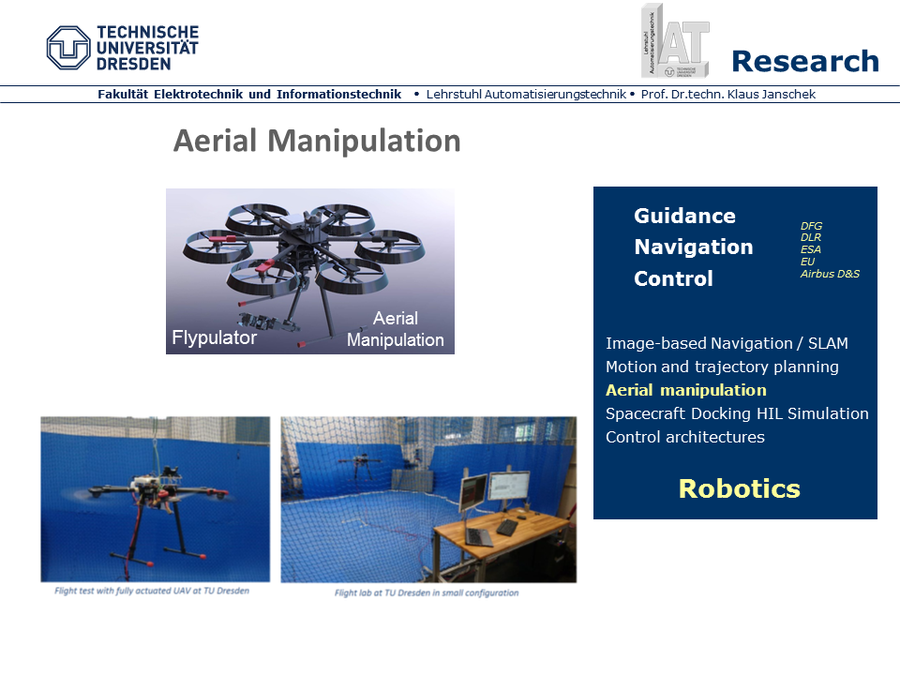
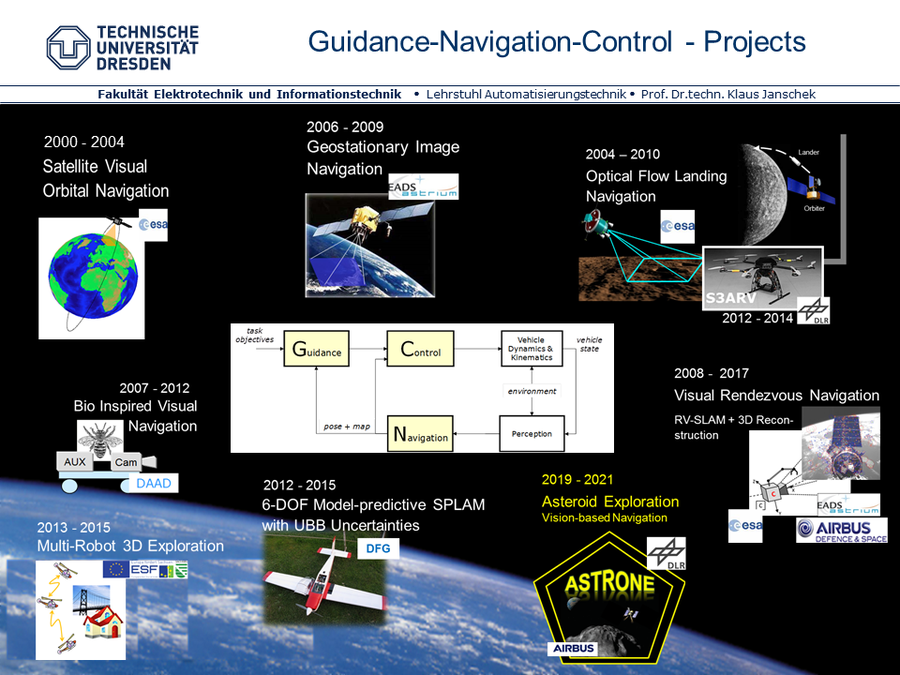
The research area Robotics comprises the development of minimum-effort concepts and solutions for Guidance-Navigation-Control of autonomous vehicles (aerial and space vehicles, service robots), development of control algorithms and system concepts for aerial manipulation with drones and the system design of hardware-in-the-loop (HIL) test benches for the ground verification of spacecraft docking dynamics. Current work includes optical flow and LIDAR-based navigation for planetary landing vehicles, image-based rendezvous navigation for non-cooperative spacecraft (rendezvous SLAM and 3D object reconstruction) and cooperative trajectory planning. Recent projects cover image navigation for geostationary weather satellites, safe set-based navigation and path planning, behavior-based control architectures and bio-inspired visual navigation and path planning.
| Duration: | 02/2021 - 09/2024 |
| Project Management: |
Christoph Pauly (Projektkoordinator), Prof. Klaus Janschek (TU Dresden) |
| Project Team: | Dipl.-Ing. Yao Luo (TU Dresden) |
| Project Partner | Fritz H. Pauly Steuer- und Regelanlagen GmbH & Co. KG; descript Solutions GmbH; SIECOM® IT-Systemhaus GmbH; TRIMA Triebeser Maschinenbau GmbH |
| Funding: | Gefördert durch: Bundesministerium für Wirtschaft und Klimaschutz aufgrund eines Beschlusses des Deutschen Bundestages |
Kurzfassung
Entwickelt wird ein sich selbst orientierender, autark arbeitender Roboter für Inspektion und Schadensdetektion sowie Überwachungsfunktionen auf industriellen Flachdächern. Er orientiert sich selbständig und erkundet Dachflächen. Dabei werden Schäden, die für das Dach, Menschen oder Prozesse unter dem Dach Risiken darstellen, detektiert und auch Überwachungsfunktionen ausgeführt.
Teilprojekt für Technische Universität Dresden - Institut für Automatisierungstechnik:
Entwicklung von Algorithmen und der Software zu den odometrischen Berechnungen und zur kamerabasierten Bestimmung der Position und Orientierung für den Roboter sowie Tests in einer Gesamtsimulationsumgebung.
Achievements
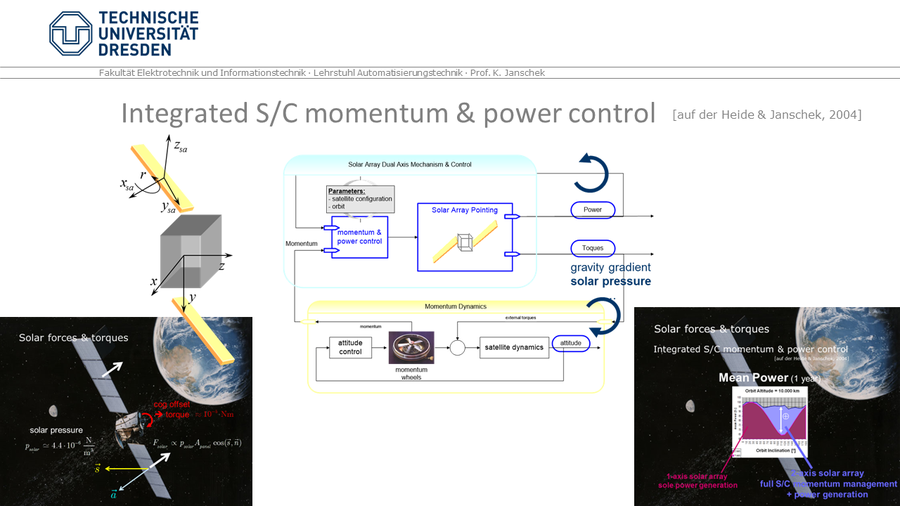
Conceptual design and feasibility studies for advanced space systems:
- synergetic use of gimballed solar arrays for optimized momentum and power management of satellites;
- satellite based road traffic monitoring;
- introducing industrial automation technologies for onboard use on satellites;
- combined modelling of technical and economic space system properties;
- ESA and DLR contracts.
Selected Publications
|
Kolja auf der Heide: |
|
K. auf der Heide, K. Janschek, A. Tkocz: |
|
auf der Heide, K., Janschek, K: |
| Janschek, K., Braune, A.: Application of Industrial CAN Bus Technology for LEO-Satellites. Acta Astronautica, Vol. 46, Nos.2-6, pp.313-317, Pergamon Press, 2000 |
Achievements
- New concepts and algorithmic solutions for onboard navigation systems using minimum hardware and complementary sensors;
- EU and state funding
Selected Publications
|
Janschek, K., Boge, T., Krasilshikov, M., Jacobson, M. V.: |
|
Janschek, K., Boge, T., Döge, K.P.: |
|
Janschek, K., Boge, T., Krasilshikov, M. N., Dishel, V., Jacobson, M. V.: |
Achievements
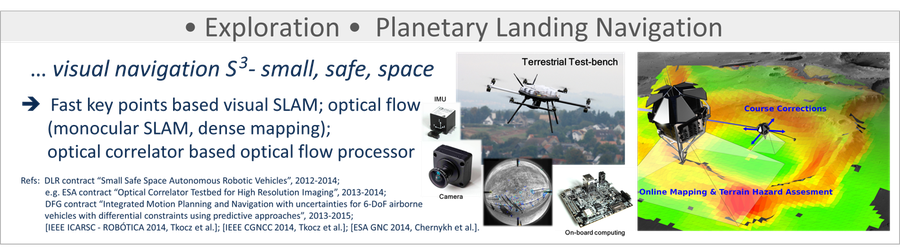
- Monocular optical flow navigation approach using 2D correlation approach with high robustness for weak illumination conditions;
- New concepts and algorithms for robust estimation of impactor effectiveness for asteroid deflection using observations from a reconnaissance spacecraft;
- ESA and DLR contracts; Industry funding (Airbus DS).

Planetary Landing - Optical Flow with DEM Matching © V. Chernykh

Selected Publications
|
Simon Delchambre: |
|
Delchambre, S.; Ziegler, T.; Trigueros, C.P.D.; Falke, A.; Johann, U.; Janschek, K.: Monocamera-Based Solar Radiation Pressure Estimation for Small-Body Rendezvous Missions. |
|
Delchambre, S,: Ziegler, T.; Falke, A.; Janschek, K.: |
|
Delchambre, S.; Ziegler, T.; Johann,U.; Falke, A.; Janschek, K.: |
| Delchambre, S.; Ziegler, T.; Johann, U.; Falke, A.; Janschek, K.: Landmark Based Pose Estimation for Autonomous Inertial Hovering around Small Solar System Bodies, In: Proceedings of 10th ESA Guidance Navigation & Control Conference, Salzburg, Austria, 2017 |
|
Delchambre, S.; Ziegler, T.; Falke, A.; Johann, U.; Willich, G.; Janschek, K.: |
|
Chernykh, V., Beck, M., Janschek, K.: |
|
K. Janschek, V. Tchernykh, M. Beck: |
|
K. Janschek, V. Tchernykh, M. Beck: |
Achievements
- Single camera navigation solutions (payload camera, simple navigation camera) for orbiting satellites using 2D correlation based image motion tracking and 2D correlation with self-owned optical correlator technology;
- ESA and Airbus DS contracts, EU funding;
- 1 patent

Selected Publications
|
Zaunick, E., Janschek, K., Levenhagen, J.: |
| Serguei Dyblenko:
Autonomous satellite navigation with image motion analysis using two-dimensional correlation. |
|
Dyblenko, S., Janschek, K.: |
|
Janschek, K., Dyblenko, S.: |
|
Janschek, K., Boge, T., Tchernykh, V., Dyblenko, S.: |
Achievements
- Estimation algorithms for relative pose and geometric structure estimation for the rendezvous with uncooperative and unknown spacecraft using multi-image data fusion (visual + infrared cameras, laser scanner);
- Comprehensive sensitivity analysis for ENVISAT servicing with real-time algorithm implementation and hardware-in-the-loop demonstration;
- ESA and Airbus DS contracts
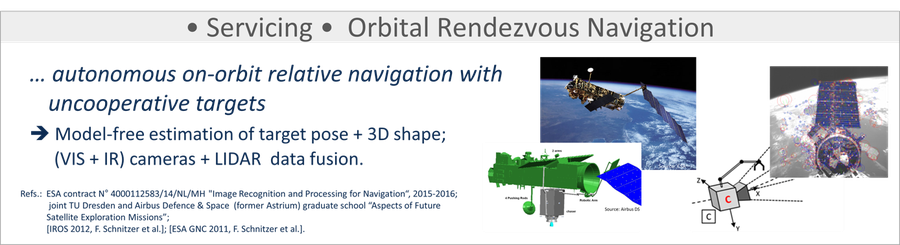
IRPN - Image-based rendezvous navigation - approaching the target satellite ENVISAT © A. Sonnenburg / F. Schnitzer
IRPN - Image-based rendezvous navigation - VIS camera only / estimated pose = grid overlay © A. Sonnenburg / F. Schnitzer
Simulation experiment 1VA for spacecraft 3D shape reconstruction © F. Schnitzer
3D shape reconstruction from image-based point clouds for unknown and non-cooperative spacecraft
- simulation experiment
Experimental verification of 3D shape reconstruction on MiPOS (Mini Proximity Operations Simulator) © F. Schnitzer
3D shape reconstruction from image-based point clouds for unknown and non-cooperative spacecraft
- laboratory experiment with stereo-camera and MiPOS - Mini Proximity Operations Simulator at LS-AT
Selected Publications
|
Schnitzer, F., Sonnenburg, A., Janschek, K., Sanchez Gestido, M.: |
| Frank Schnitzer: Ein Systemansatz zur bildbasierten Navigation und Geometrierekonstruktion für Raumfahrt-Rendezvousmanöver. Dissertation, TU Dresden, Vogt Verlag, Dresden, 2013. |
|
Schnitzer, F., Janschek, K., Willich, G.: |
| Schnitzer, F., Sonnenburg, A., Janschek, K., Willich, G.: SLAM-based 3D Shape Estimation for Rendezvous with Uncooperative and Unknown Target Spacecraft. In: Proceedings of the 8th International ESA Conference on Guidance and Navigation Control Systems – ESA GNC 2011, 5 - 10 June 2011, Carlsbad, Czech Republic |
|
Sonnenburg, A., Tkocz, M., Janschek, K.: |
Achievements
- New solutions for overcoming the observability problems of scale ambiguity with monocular imaging;
- Use of 2D correlation approach for optical flow navigation and DEM matching;
- DFG / ESA / State funding.

Observability-driven 6DOF body-centric monocular SLAM © M. Markgraf
Observability-driven 6DOF body-centric monocular SLAM (M. Markgraf)
- here shown: full observability during accelerated motion with monocular vision
UAV - DEM Matching from optical flow © V. Chernykh
Monocular optical flow navigation for UAVs with fisheye camera
- Optical flow generation from 2D correlation of monocamera image sequences
- Pose estimation by matching of DEM (Digital Elevation Maps) using 2D correlation
UAV - DEM Matching from optical flow © V. Chernykh
Monocular optical flow navigation for UAVs with fisheye camera
- Optical flow generation from 2D correlation of monocamera image sequences
- Pose estimation by matching of DEM (Digital Elevation Maps) using 2D correlation
VINS-stereo outdoor SLAM using MYNT EYE S stereo visual inertial sensor © Jinyao Zhu
Stereo Visual-Inertial Fusion for UAV State Estimation
- 6 DOF pose estimation
- fusion of inertial and image data
- MYNT EYE S stereo visual-inertial sensor
Selected Publications
| Zhu, J., Yao, Ch., Janschek. K.: Stereo Visual-Inertial Fusion for UAV State Estimation. IFAC-PapersOnLine, Volume 53, Issue 2, 2020, Pages 9420-9425, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2020.12.2412 |
| Marcel Markgraf: An Observability-Driven System Concept for Monocular-Inertial Egomotion and Landmark Position Determination. Dissertation, TU Dresden, 2018. Dissertation Download |
| Tkocz, M., Janschek, K.: Towards Consistent State and Covariance Initialization for Monocular SLAM Filters. Journal of Intelligent & Robotic Systems: Volume 80, Issue 3 (2015), pp. 475-489 |
|
Tkocz, M., Janschek, K.: |
|
Tkocz, M., Janschek, K.: |
| V. Tchernykh, M. Beck, K. Janschek: Optical Flow Navigation for an Outdoor UAV using a wide Angle Mono Camera and DEM Matching. In: Proceedings of the 4th IFAC Symposium on Mechatronic Systems, MECHATRONICS 2006, 12-14 September 2006, Heidelberg, Germany, paper no. 212, www.ifac-papersonline.net, Mechatronic Systems, Volume # 4 , Part# 1 |
Achievements
- Conceptual and technology development for aerial manipulation with free fyling fully actuated multicopters;
- Fault tolerant hybrid task priority control;
- Nonlinear impedance control for aerial manipulation;
- Flight control of overactuated multicopter;
- State funding; Cooperation with Professur für Dynamik und Mechanismentechnik, Prof. M. Beitelschmidt (TU Dresden)
Selected Publications
|
Schuster, M., Bernstein, D., Yao, Ch., Janschek, K., Beitelschmidt, M.: |
|
Yao, Ch., Schuster, M., Jiang, Y., Janschek, K., Beitelschmidt, M.: |
|
Schuster, M., Bernstein, D., Yao, Ch., Janschek, K., Beitelschmidt, M.: |
|
Wilmsen, M., Yao, Ch., Schuster, M., Li, Sh., Janschek, K.: |
|
Yao, Ch., Dunkelberg, N., Janschek, K.: |
|
Yao, Ch.; Krieglstein, J.; Janschek, K.: |
|
Yao, Ch.; Krieglstein, J.; Janschek, K.: |
Achievements
- Motion and trajectory planning for aerial and terrestrial vehicles as well as for robotic manipulation;
- New formulation of randomized trajectory planning algorithm RRT* for differentially flat systems with input and state constraints;
- New semi-infinite optimization algorithm for trajectory optimization using a primal-dual-interior-point formulation and adaptive discretization;
- Cooperative trajectory planning for complex vehicle structures;
- Exploring/Exploiting Tree (EET) Motion Planner;
- DFG and state funding; cooperation with Fraunhofer Institut für Verkehrs- und Infrastruktursysteme (IVI).
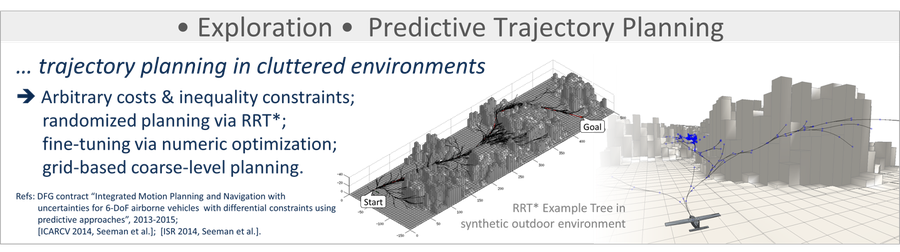
Hybrid Planning and Optimization Concept © M. Seemann
Hybrid Planning and Optimization Concept (M. Seeman)
- here shown: RRT* based planning in dense environment for fixed wing aerial vehicle with nonholonomic constraints

Selected Publications
| Keppler, F., Wagner, S., Janschek, K.: SAFESTOP: Disturbance Handling in Prioritized Multi-robot Trajectory Planning. 4th IEEE International Conference on Robotic Computing, IRC 2020. Proceedings : 9-11 November 2020, Virtual Conference, Los Alamitos, Calif.: IEEE Computer Society Conference Publishing Services (CPS), 2020, ISBN: 978-1-7281-5238-7, ISBN: 978-1-7281-5237-0, pp. 226-231. |
| Liu, B. Scheurer, Chr., Janschek, K.: Motion Planning with Cartesian Workspace Information. IFAC-PapersOnLine, Volume 53, Issue 2, 2020, Pages 9826-9833, ISSN 2405-8963, https://doi.org/10.1016/j.ifacol.2020.12.2686 |
|
Seemann, M., Janschek, K.: |
| Martin Seemann: A Partially Randomized Approach to Trajectory Planning and Optimization for Mobile Robots with Flat Dynamics. Dissertation, TU Dresden, 2018. Dissertation Download |
|
Seemann, M., Janschek, K.: |
|
Pfanne, M., Janschek, K.: |
Achievements
-
Non-conventional algorithm solutions for localization and path planning of mobile robots using set-based approaches;
-
Non-conventional algorithm solutions for localization and path planning of mobile robots using behaviour-based fuzzy approaches;
-
Versatile control systems architecture and programming framework APECA for behaviour based control using action primitives;
-
Service Robotics: control system design (path planning, navigation, motion control) and prototyping for a commercial wheel-less service robot (industry contract)
- Control and friction compensation of elastic manipulators;
- State / DAAD / DLR / industry funding.
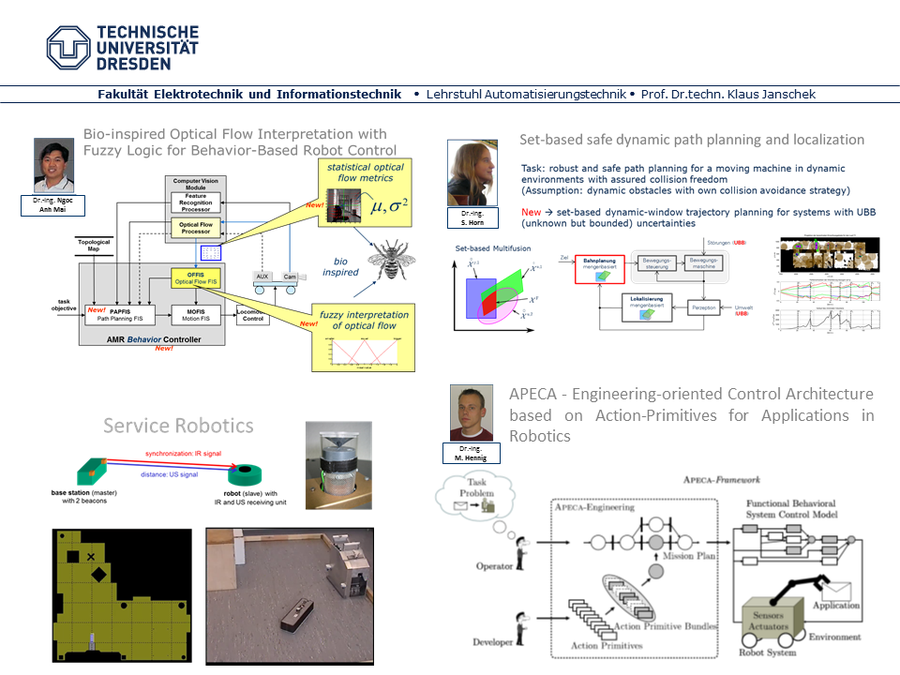
A set-based multi-fusion approach for navigation of mobile platforms with guranteed collision-free motion (Sylvia Horn)
Set-based GNC in indoor environment with moving objects © S. Horn
An autonomous mobile platform must be able to operate in a partially unknown and dynamic environment. This requires the acquisition of diverse enviromental information, which is generally affected by noise. Assuming that the probability distributions of the uncertainties are unknown, but bounded, interesting estimates can be modeled as sets. This thesis introduces a novel set-based navigation concept, which handles set-based information safely and productive.
To achieve a high degree of accuracy in the platform localization, multifarious information from different sources is gathered and merged to obtain a more precise pose estimation area. This merger is called set-based multifusion. Similarly the principle of multifusion can be applied to the platform guidance. Here diverse information has also to be combined to calculate a collision-free path to the goal. The verification of the presented set-based algorithms was conducted via real and simulated experiments.
Optical flow-based perception, behavior-based control, and topological path planning for mobile robots using fuzzy logic concepts (Mai Ngoc Anh)
Bio-inspired Optical Flow Interpretation with Fuzzy-Logic for Behavior-based Robot Control © Mai Ngoc Anh
In this thesis, a new approach of optical flow-based perception through qualitative interpretations is developed. The qualitative optical flow interpretations provide mobile robots with visual perception a more detailed image of their 3D working environment, e.g. obstacle positions and indoor object types. By using fuzzy logic for the interpretations, the optical flow perception becomes simple and intelligent in a bioinspired manner and moreover gains robustness under noisy conditions in the working environment.
On the other hand, this thesis develops a generic modular structure of a behavior-based control system with three clearly separate modules for perception, motion control, and path planning. The system concept is independent of the specific type of perception. The designed behaviors are functionally classified into two separated modules, concerning collision-free motion control and goal oriented path planning. Some of the behaviors use fuzzy logic concepts, which result in flexible and smooth robotic motion.
Furthermore a new scheme for topological path planning in combination with fuzzy-based behaviors is developed for the goal-oriented navigation of a mobile robot. This combination allows a mobile robot to perform topological path planning in a real environment without metric information regarding its global and local positions.
Engineering-oriented Control Architecture based on Action Primitives for Applications in Robotics (Matthias Hennig)
APECA - dual robot synchronization with action-primitives © M. Hennig
The APECA framework provides a flexible control architecture for robotic systems for behavior-based control. The conceptual design combines different requirements identified in miscellaneous robotic control approaches. The main focus of the resulting concept is on a simplified engineering process for the controller design. This approach is supported by the use of atomic system behaviors, the so called action primitives, in a special module hierarchy.
For this purpose a distinction between a functional behavior based system model with hierarchically and also parallelly executed action primitives and a sequential control system model with a task-dependent activation of the primitives is proposed. These models are assigned to different users through a distinct user concept. An object-oriented implementation of the proposed architecture allows the utilization and synchronisation of multiple (sub-)systems within one framework. In this work the proposed framework will be discussed, a prototypical implementation will be presented and results based on different experimental scenarios will be shown.
Selected Publications
| Sylvia Horn: Ein mengenbasierter Multifusionsansatz zur Navigation mobiler Plattformen mit garantierter Kollisionsfreiheit. Dissertation, TU Dresden, 2014. Vogt Verlag, Dresden |
|
Matthias Hennig: |
|
Hennig, M., Janschek, K.: |
| Luc Le-Tien:
Ansätze zur entkoppelten Regelung von mechanisch gekoppelten Doppelgelenken eines DLR-Medizinroboters. |
|
Le-Tien, L., Albu-Schäffer, A., Janschek, K., Hirzinger, G.: |
|
H. Kirmse, M. Hennig, K. Janschek: |
IRPN - Image-based rendezvous navigation - approaching the target satellite ENVISAT © A. Sonnenburg / F. Schnitzer
ESA Project IRPN - Image Recognition and Processing for Navigation
This activity provides design, development and verification of the necessary capabilities in image processing for position, pose and angular motion detection on uncooperative targets in an Active Debris Removal scenario.
IRPN - Image-based rendezvous navigation - VIS camera only / estimated pose = grid overlay © A. Sonnenburg / F. Schnitzer
ESA Project IRPN - Image Recognition and Processing for Navigation
Relative chaser-target state estimates are provided by specific image recognition and processing (IRP) algorithms and sensor fusion algorithms in a navigation function (NAV) using sensor data from cameras in the visible spectrum (VIS) and infrared spectrum (IR)) and light detection and ranging (LIDAR) considering as reference mission the Active Debris Removal of ENVISAT (100 … 2 m).
Planetary Landing - Optical Flow with DEM Matching © V. Chernykh
Monocular optical flow navigation for planetary landing
- Optical flow generation from 2D correlation of monocamera image sequences
- High resilience to weak illumination and flat image textures
- Optical flow from in-house embedded optical correlator processor
UAV - Optical Flow Fisheye Camera // camera (left) / optical flow (middle) / local depth (right) © V. Chernykh
Monocular optical flow navigation for UAVs with fisheye camera
- Optical flow generation from 2D correlation of monocamera image sequences
- Optical flow from in-house embedded optical correlator processor
UAV - DEM Matching from optical flow © V. Chernykh
Monocular optical flow navigation for UAVs with fisheye camera
- Optical flow generation from 2D correlation of monocamera image sequences
- Pose estimation by matching of DEM (Digital Elevation Maps) using 2D correlation
RRT* trajectory planning for fixed wing aerial vehicle with nonholomic constraints © M. Seemann
Trajectory planning with nonholomic constraints
- RRT* trajectory for winged aerial vehicles with nonholonomic constraints
VINS-stereo outdoor SLAM using MYNT EYE S stereo visual inertial sensor © Jinyao Zhu
Stereo Visual-Inertial Fusion for UAV State Estimation
- 6 DOF pose estimation
- fusion of inertial and image data
- MYNT EYE S stereo visual-inertial sensor

Small S/C HIL docking simulation - challenges from parasitic dynamics © K. Bondoky
Docking example for two small spaccraft
- real behavior vs. HIL simulation with parasitic dynamics
- unrealistic physical HIL simulation may suggests wrong docking result because of parasitic dynamics
- here the first experiment suggests wrongly "failed docking"
Selected Publications
| Karim Bondoky: A Contribution to Validation and Testing of Non-Compliant Docking Contact Dynamics of Small and Rigid Satellites Using Hardware-In-The-Loop Simulation. Dissertation, TU Dresden, 2020. Dissertation Download |
|
Bondoky, K., Janschek, K., Rathke, A. and Schwarz, S.: |
|
Bondoky, K., Janschek, K., Rathke, A. and Schwarz, S.: |
|
Bondoky, K., Janschek, K., Rathke, A. and Schwarz, S.: |
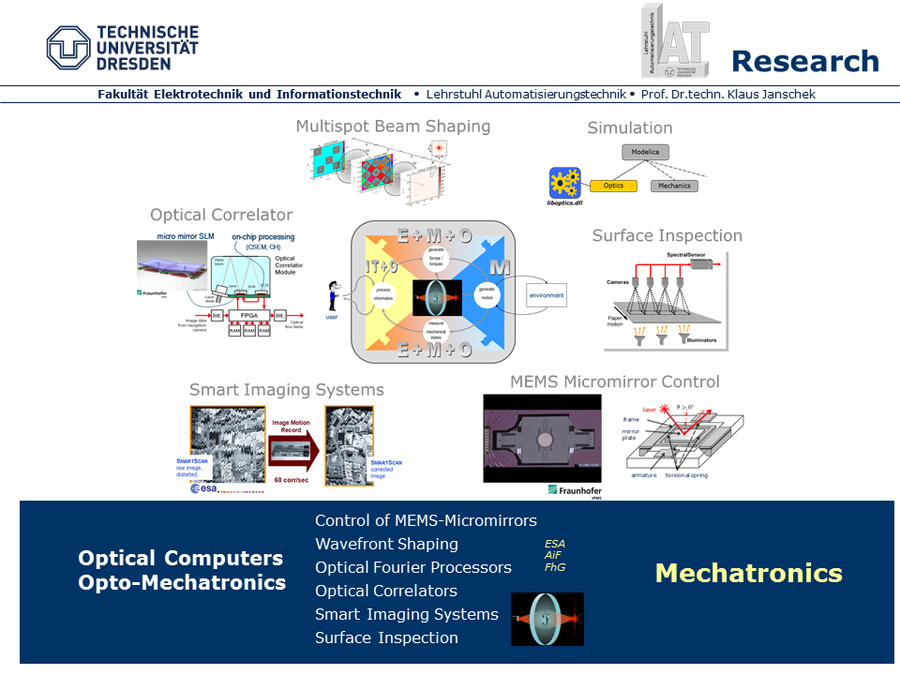
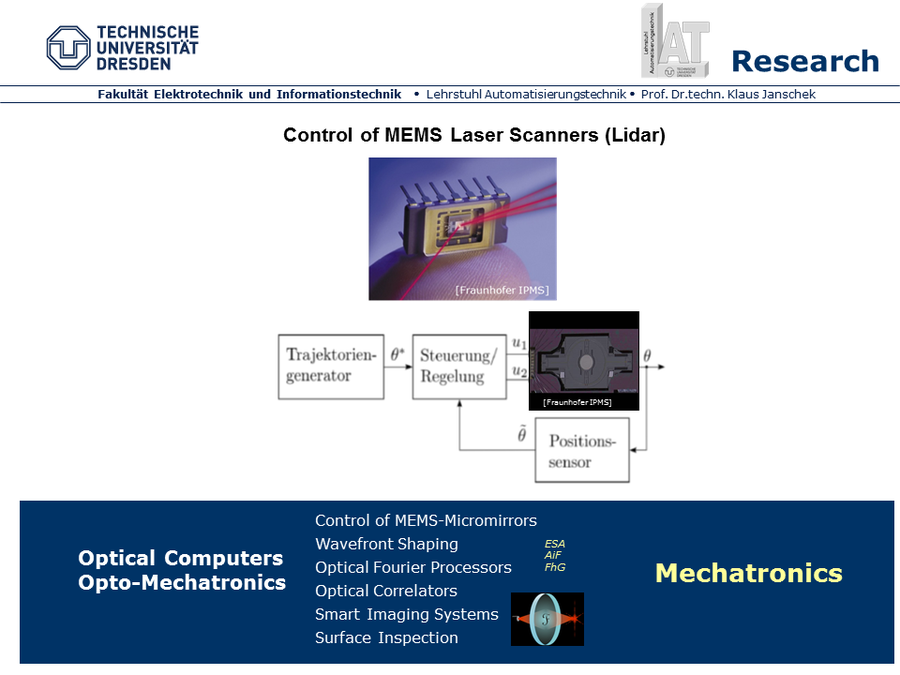
Research Area - MECHATRONICS
The research area Mechatronics focuses on the development of optomechatronics system solutions and technologies. The research and development activities are spanning from the control of MEMS micromirrors and wavefront shaping, to the development of high-performance and compact optical Fourier processors and optical correlators and their usage in smart imaging systems for remote sensing and visual navigation, as well as optical measurement systems for industrial visual inspection systems, and computer-aided modeling and simulation of optomechatronic systems..

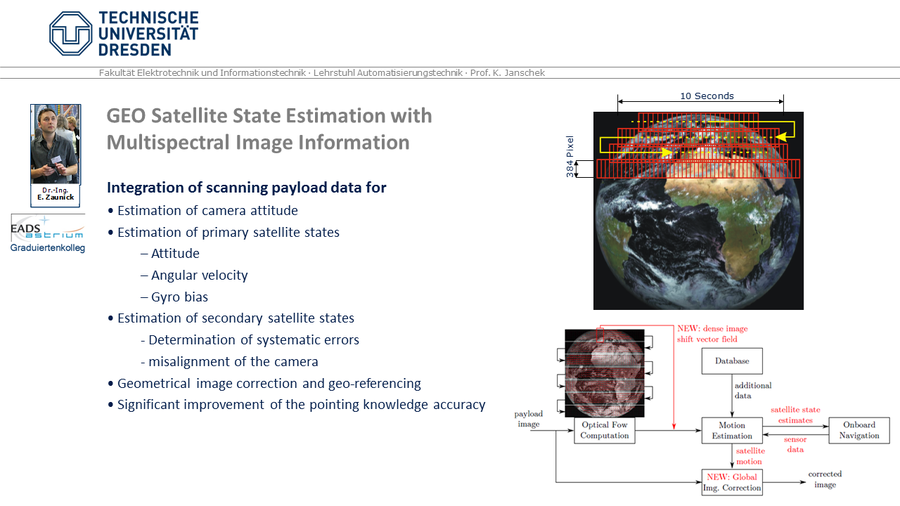
SmartScan - Smart Imaging for Pushbroom Cameras ** Airborne Test © K. Janschek
SmartScan - Airborne Test
- image motion recorded by sequential images from area image sensors in image plane
- image motion trajectory derived from image-motion tracking by onboard embedded optical correlator
- post-flight pushbroom image correction using recorded image motion trajectory


Selected Publications
|
Chernykh, V., Janschek, K., Harnisch, B.: High Accuracy Line-of-Sight Stabilization for GEO High-resolution Earth Observation Missions with Onboard Optical Correlator: Imaging Performances Estimation. In: Proceedings of 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, 29 May -2 June 2017. |
|
Chernykh, V., Grzelak, S., Janschek, K., Harnisch, B.: Design & Analysis of High Accuracy LOS Stabilization for GEO High-Resolution Imaging Missions with Onboard Optical Correlator. In: Proceedings of 9th International ESA Conference on Guidance, Navigation & Control Systems, Oporto, Portugal, 2 - 6 June 2014. |
| Janschek, K., Tchernykh, V., Dyblenko, S.: Performance analysis of opto-mechatronic image stabilization for a compact space camera. Control Engineering Practice, Volume 15, Issue 3, March 2007, Pages 333-347 |
|
Tchernykh, V., Dyblenko, S., Janschek, K., Seifart, K., Harnisch, B.: Clever Imaging with SmartScan. ESA Bulletin No. 123, August 2005, pp.40-45. |
| K. Janschek, V. Tchernykh, S. Dyblenko: Integrated Camera Motion Compensation by Real-Time Image Motion Tracking and Image Deconvolution. In: Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, California, USA, 24-28 July, 2005, pp. 1437-1444. |
| K. Janschek, V. Tchernykh, S. Dyblenko: Opto-Mechatronic Image Stabilization for a Compact Space Camera. In: Preprints of the 3rd IFAC Conference on Mechatronic Systems - Mechatronics 2004, 6-8 September 2004, Sydney, Australia, pp.547-552. ** Conference Best Paper Award ** |
| K. Janschek, V. Tchernykh, S. Dyblenko, B.Harnisch: Compensation of the Attitude Instability Effect on the Imaging Payload Performance with Optical Correlators. Acta Astronautica 52 (2003) pp.965-974 |

Selected Publications
| Matthias Roth: Contributions to the design of Fourier-optical modulation systems based on micro-opto-electro-mechanical tilt-mirror arrays. Dissertation, TU Dresden, 2020. Dissertation download |
|
Roth, M.; Heber, J.; Janschek, K.: Modulating Complex Beams in Amplitude and Phase Using Fast Tilt-Micromirror Arrays and Phase Masks. In: Optics Letters 43.12 (June 2018), pp. 2860-2863. doi: 10.1364/OL.43.002860 |
|
Roth, M.; Heber, J.; Janschek, K.: Spatial Beam Shaping in Amplitude and Phase for Multispectral Applications Using Binary Amplitude Modulators and Phase Masks. In: 11th International Conference on Optics-photonics Design and Fabrication, Hiroshima/Japan (Nov. 2018) |
|
Roth, M., Heber, J., Janschek, K.: Concept for the fast modulation of light in amplitude and phase using analog tilt-mirror Arrays. Proc. SPIE 10116, MOEMS and Miniaturized Systems XVI, 101160H (February 20, 2017); doi:10.1117/12.2250746 |
|
Roth, M., Heber, J., Janschek, K.: System design of programmable 4f phase modulation techniques for rapid intensity shaping: A conceptual comparison. In: Proc. SPIE 9736, Laser-based Micro- and Nanoprocessing X, 97361G (March 4, 2016); doi:10.1117/12.2210917 |
|
Kaden, Th., Janschek, K., Neuber, E.: Integrating Diffractive Optomechatronic System Models in Modelica-based Simulation Environments. In: Proceedings of the 18th IFAC World Congress, August 28 - September 2, 2011, Milano, Italy, pp. 9434-9439. |
Achievements
- Open and closed loop control of electrostatic MEMS;
- Nonlinear control of non-smooth mechatronic systems;
- State and DAAD funding
Selected Publications
|
Schroedter, R., Grahmann, J., Janschek, K.: |
| Richard Schroedter: Model-based system design for the control of quasi-static micro scanning mirrors with electrostatic comb drive. Dissertation, TU Dresden, 2018. Jörg Vogt Verlag, Dresden, 340 pages, ISBN: 9783959470308 |
|
Schroedter, R.; Roth, M.; Janschek, K.; Sandner, T.: |
|
Schroedter, R.; Schwarzenberg, M.; Grahmann, J.; Sandner, T.; Janschek, K.: |
|
Dong, R., Tan, Y., Xie, Y., Janschek, K.: |
|
Schroedter, R.; Schwarzenberg, M.; Dreyhaupt, A.; Barth, R.; Sandner, T.; Janschek, K.: |
|
Dong, R., Tan, Y., Janschek, K., Chen, X.: |
|
Dong, R., Tan, Y., Janschek, K.: |
|
Schroedter, R.; Sandner, T.; Janschek, K.; Roth, M.; Hruschka, C.: |
|
Schroedter, R., Janschek, K., Sandner, Th.: |
|
Janschek, K., Schroedter, R., Sandner, Th.: |
|
Janschek, K., Sandner, Th., Schroedter, R., Roth, M.: |
Achievements
-
Development and demonstration of embedded optical Fourier processor and optical correlator technology (diffractive optics);
-
Worldwide 1-st optical space pre-qualified optical correlator (thermal, vacuum, radiation, vibration) using a MEMS micromirror spatial light modulator;
-
ESA contracts; 1 patent.

Selected Publications
|
Tchernykh, V., Beck, M., Janschek, K.: |
|
V. Tchernykh, M. Beck, K. Janschek: |
|
Janschek, K., Tchernykh, V.: |
|
Tchernykh, V., Dyblenko, S., Janschek, K.: |
Achievements
- Comprehensive textbook on fundamental methods for model-based design of mechatronic systems.
- The method framework comprises domain-neutral methods for modeling and performance analysis: multi-domain modeling (energy/port/signal-based), simulation (ODE/DAE/hybrid systems), robust control methods, stochastic dynamic analysis, and quantitative evaluation of designs using system budgets.
- New: unified models for reciprocal transducers

Selected Publications
|
Book |
|
Book |
| Book Janschek, K.: Mechatronic Systems Design: Methods, Models, Concepts -机电系统设计方法、模型及概念. Chinese translation, |
|
Malzahn J., Barasuol V., Janschek K.: |
|
Janschek, K.: |
Research Area - INDUSTRIAL AUTOMATION
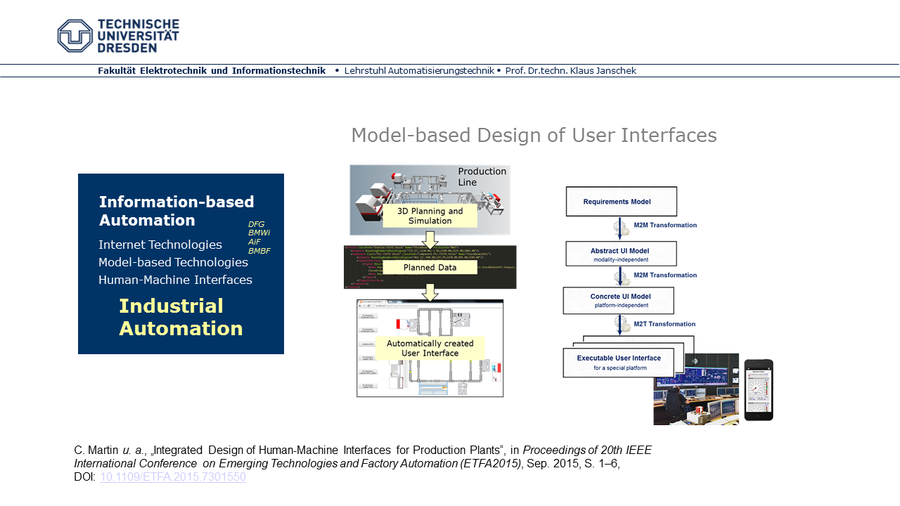
The research area of Industrial Automation focuses on the application of innovative information technologies e.g. model-driven and communication technologies, their challenges and risks for automation solutions. The goals are the conception and design of formal models and languages for a systematic and consistent design of automation systems to support essential use cases in the life cycle of automation systems such as Plug&Produce or Continuous Engineering. One application field is the development of sub models for Human-Machine Interface fragments for a self-description within Industrie 4.0 components following industrial requirement definitions. Another field is the conception and development of novel multimodal user interfaces to intelligently network people and remote product surfaces using internet and telecommunication technologies (Web, XML, Web services, 5G technologies).
Previous research was focusing on automation of closed material cycles (1994-2013) and SPS & Motion Control and electromagnetic compatibility (1990-2000).
Selected Publications
|
C. Martin u. a., „Integrated Design of Human-Machine Interfaces for Production Plants“, in Proceedings of 20th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA2015), Sep. 2015, S. 1–6, DOI: 10.1109/ETFA.2015.7301550 |

Selected Publications
|
C. Martin and A. Braune: Multimodal Inspection of Product Surfaces using Mobile Consumer Devices. 22nd International Conference on Human-Computer Interaction, Copenhagen Denmark, 2020; http://2020.hci.international/program.html |
Selected Publications
|
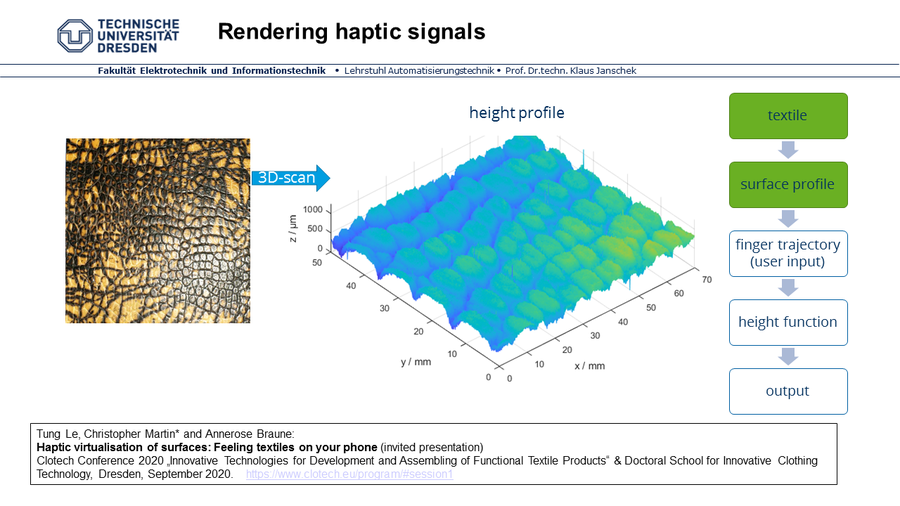
Tung Le, Christopher Martin* and Annerose Braune: Haptic virtualisation of surfaces: Feeling textiles on your phone (invited presentation), Clotech Conference 2020 „Innovative Technologies for Development and Assembling of Functional Textile Products“ & Doctoral School for Innovative Clothing Technology, Dresden, September 2020. https://www.clotech.eu/program/#session1 |
Selected Publications
|
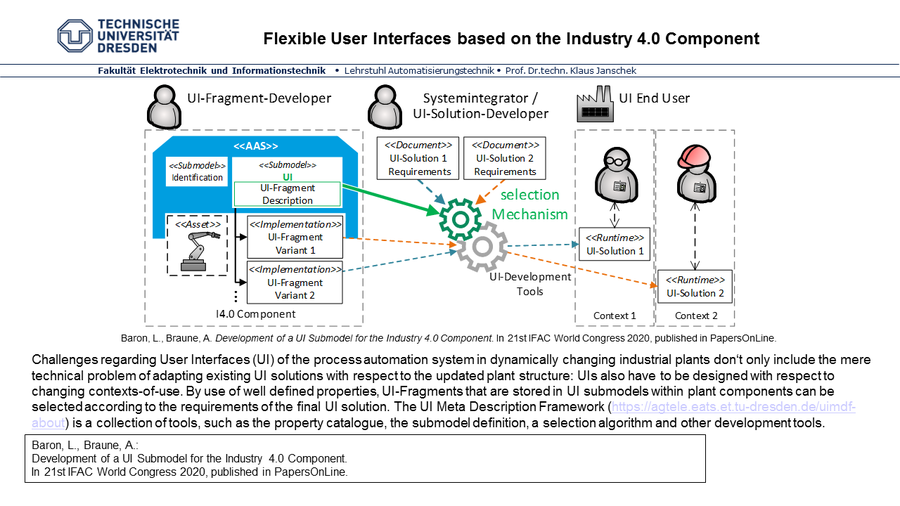
Baron, L., Braune, A.: Development of a UI Submodel for the Industry 4.0 Component. |