May 17, 2025
Accessible, Sensor-Ready, Soft–Rigid Robotic Hand for Research and Education
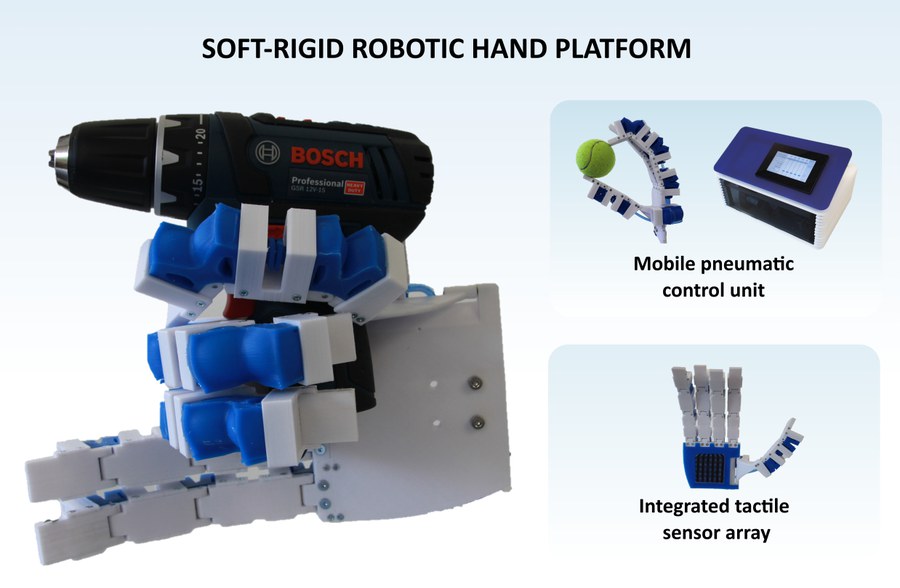
A new scientific study, recently published in the journal Actuators (MDPI), presents a prototype of a soft–rigid hybrid anthropomorphic robotic gripper with an integrated tactile sensor array that aims to improve accessibility and usability in soft robotics.
This paper addresses the lack of accessible, modular, and sensor-ready soft robotic platforms that combine compliance, mechanical robustness, simplicity, and practical usability. While many advanced robotic hands exist, they are often prohibitively expensive, difficult to modify or build due to closed-source designs, and do not provide suitable surfaces for integrating tactile sensors.
We propose a low-cost, modular, soft–rigid hybrid joint design that follows simple forward kinematics and is manufactured using accessible techniques, such as Fused Deposition Modelling (FDM) printing and silicone molding. The rigid skeleton provides mechanical support, guides the actuator motion, and offers integration space for tactile sensors while effectively isolating them from actuator deformation and unintended activation. The soft actuators, in turn, ensure adaptive and compliant interaction with the environment.
The novelty of our work lies in the unique combination of affordability, a straightforward hybrid mechanical design, simplified pneumatic control, and sensor-compatible architecture, offering a practical and customizable gripper for research, education, and real-world applications.
Key technical highlights include:
- Modular, open-source joint design for rapid prototyping and integration
- Angular deflection of 79.5° per joint at 70 kPa, with a small bending radius ideal for discrete, human finger-like joints
- Fingertip force of up to 8.7 N at 70 kPa, notable for pneumatic direct-drive actuation
- Five-channel mobile pneumatic control platform with onboard pumps, pressure and vacuum capability, controllable via touchscreen interface or Python script
- Robotic hand supports a 4.25 kg load in a suitcase grip test at 80 kPa
- Simplified control of 15 joints enabled by compliant pneumatic actuation
This work is the result of a collaboration between engineers and researchers at the Chair of Microsystems at TUD and the PowerON Group. It was funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) and the Federal Ministry of Education and Research of Germany.
As one of the first platforms to integrate PowerON’s stretchable resistive tactile sensor array, the prototype also demonstrates reflex-like grasping behavior—such as catching a falling object based on palm sensing.
Read the full article here: https://doi.org/10.3390/act14050252