Studentische Arbeiten und SHK-Stellen
Inhaltsverzeichnis
Sie haben eine oder mehrere Lehrveranstaltungen unserer Professur besucht und dabei auch einen Einblick in unsere Forschungstätigkeit erhalten? Das erworbene Wissen und die gewonnenen Fertigkeiten können Sie gleich gewinnbringend anwenden, wenn Sie im Rahmen einer studentischen Arbeit (beispielsweise Beleg, Oberseminar, Research Project, Studien-/Diplom-/Bachelor-/Masterarbeit,...) oder als studentische Hilfskraft an einem aktuellen Forschungsthema mitarbeiten. Mehr zu den Schwerpunkten und Projekten unserer Professur finden Sie hier.
Auch wenn einmal keine passenden konkreten Themen ausgeschrieben sind, melden Sie sich gerne bei uns! Wenn möglich, versuchen wir ein Thema zu entwickeln, das zu Ihren Interessen und unseren Forschungsschwerpunkten passt.
Bei Interesse senden Sie uns bitte eine E-Mail! Wir freuen uns auf Ihre Nachricht.
Schwerpunkt Robotik
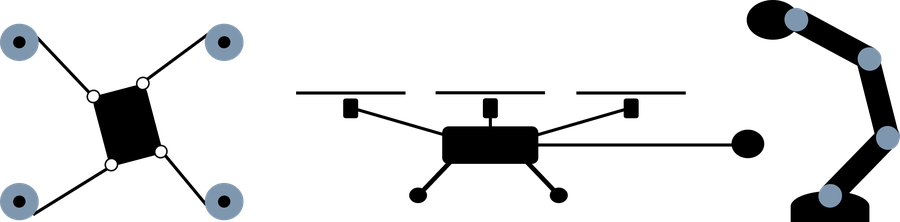
Aerial Manipulation beschreibt den Einsatz von fliegenden Robotern (Drohnen), die mit Werkzeugen ausgestattet sind, um Aufgaben auszuführen, die Kontakt zur Umgebung erfordern. Dies erfordert eine präzise Positionierung des Manipulators sowie die gezielte Einwirkung von Kräften und Momenten auf die Umgebung.
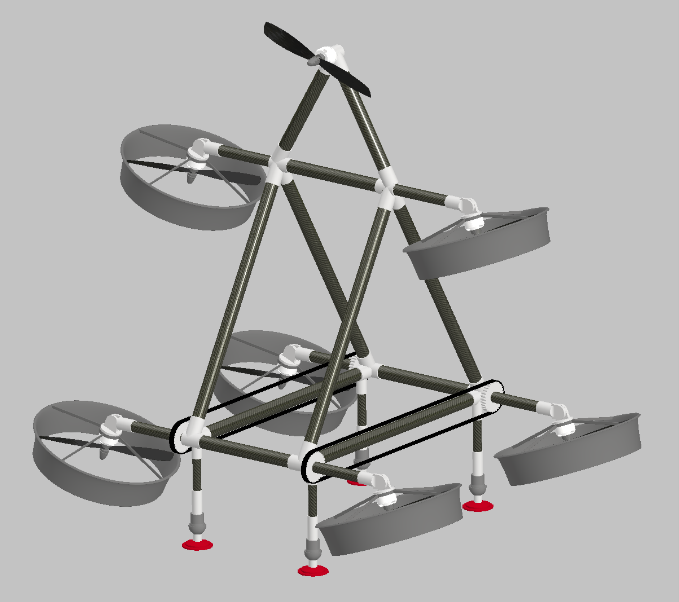
Im Rahmen der Arbeit soll eine MKS-Simulation eines neuartigen vollaktuierten Tilt-Rotor Drohnenkonzeptes durchgeführt werden.
Aufgaben:
- MKS-Simulation der Drohne in Matlab/Simulink
- Simulation der Regelung
- Simulation des Kontaktes mit der Umgebung
Kontakt: Dipl.-Ing. Jasmin Werner
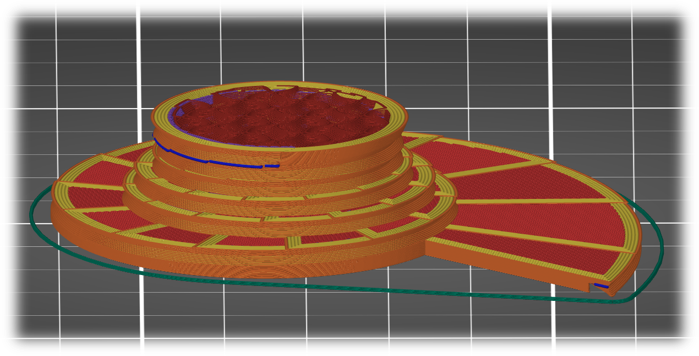
Seilroboter sind parallelkinematische Systeme, die flexible Seile statt starrer Verbindungselemente nutzen. Dabei werden die Seile üblicherweise auf Seiltrommeln aufgewickelt. Mit 3D-Druckverfahren ist die Fertigung von Seiltrommeln mit variablem Radius möglich. Diese erlauben eine Anpassung des Übersetzungsverhältnisses entlang der Seillänge.
Mögliche Aufgaben für studentische Arbeiten sind:
- Erstellen der Trommelgeometrie aus dem gewünschten Seilpfad, idealerweise als Software in Python
- CAD-Konstruktion eines Windenaufbaus zur Integration der Trommel
- Literaturrecherche und Versuche zur kontrollierten einlagigen Wicklung von Seilen
Ansprechpartner: Dipl.-Ing. Jonas Bieber
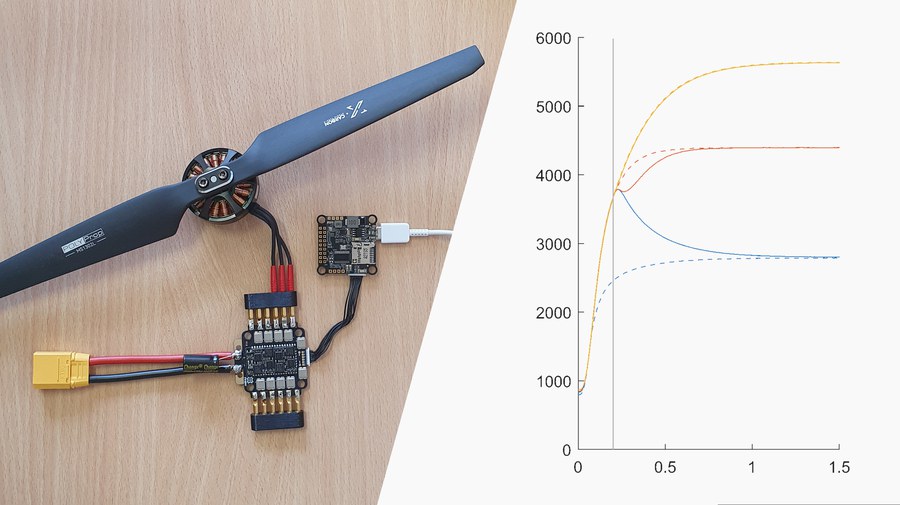
Multicopter fliegen nur durch die ständige aktive Regelung der Schubkräfte ihrer Rotoren.
Dabei wird oft vereinfachend angenommen, dass die Anpassung des Schubs sprunghaft möglich ist. In der Praxis existieren jedoch Trägheiten im System die dafür sorgen, dass sich der geforderte Schub erst mit einer signifikanten Verzögerung einstellt. Gerade bei taktilen Navigationsaufgaben werden in Zukunft jedoch höhere Ansprüche an Präzession und Reaktionsfähigkeit gestellt.
Untersucht werden soll daher das tatsächliche Zeitverhalten eines UAV-Antriebstrangs (Stromversorgung, ESC, Motor, Propeller) als wesentlicher Bestandteil eines verbesserten Simulationsmodells für Auslegung und Test neuer Regler.
Aufgaben:
- Experimentelle Untersuchung (Datenakquise)
- Optimierung von ESC Parameter für geringe dynamische Regelabweichung
- Modellierung des Systems (Systemidentifikation)
- Physikalische Interpretation
Ansprechpartner: Dipl.-Inf. Joram Brenz
Über die konkreten Ausschreibungen hinaus, können Sie uns bei Interesse an folgenden Themengebieten gerne ansprechen:
- Regelung und Steuerung
- Modellierung mit Matlab/Simulink
- Roboterkinematik
- Software- und Hardwareentwicklung
Ansprechpartner: Dipl.-Ing. David Bernstein
Schwerpunkt Schienenfahrzeuge
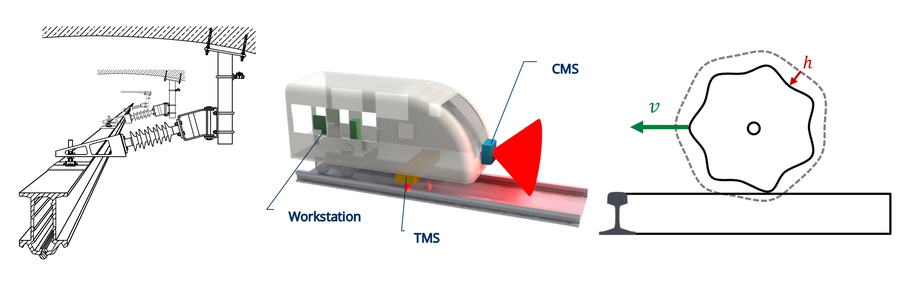
Aktuelle Forschungsschwerpunkte umfassen unter anderem Radverschleiß, Wärmerückgewinnung, Umfelderfassung und die Interaktion mit der Oberleitung. In diesen Bereichen sind vielfältige Themen möglich, an denen Sie im Rahmen einer Studienarbeit aktiv mitwirken können:
Im Rahmen der Arbeit sollen Messwerte der Messstraßenbahn Leipzig ausgewertet werden. Mit der Zielstellung einer automatisierten Detektion und Kartierung von singulären Fehlstellen soll ein Überblick über die vorhandenen Schweißstellen im Streckennetz und ihre Auswirkung auf die Fahrzeuge geschaffen werden.
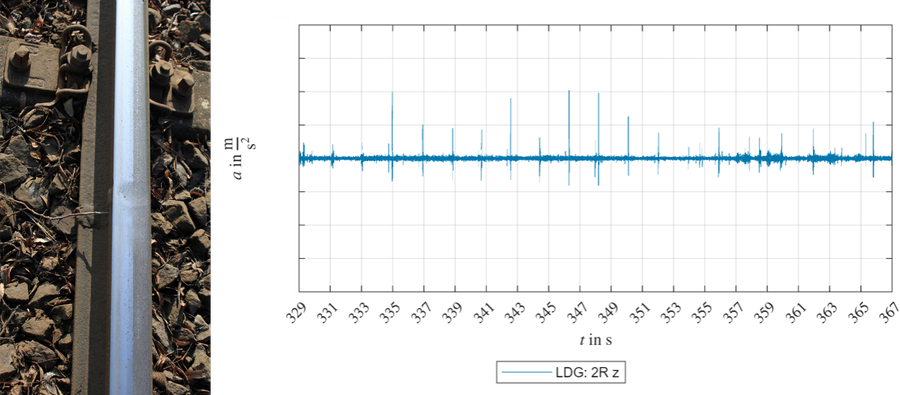
Aufgaben sind:
- Literaturrecherche zur die Identifikation singulärer Ereignisse in großen Messdatenmengen
- Implementierung von Algorithmen zur Detektion von Schweißstößen mittels Fahrzeugsensorik
- Statistische Verwertung der erkannten Fehlstellen im Streckennetz Leipzig
- Durchführung von Parameterstudien mittels MKS Simulationen (DA)
Ansprechpartner: Dipl.-Ing. Fabian Wendrock
- Entwicklung und Optimierung von Systemen zur effizienten Steuerung und Nutzung von Energieflüssen in Schienenfahrzeugen
- Untersuchung von Methoden zur Rückgewinnung und Nutzung von Abwärme, insbesondere aus Antriebsverlusten und der Leistungselektronik
- Analyse der thermischen Anforderungen an Komfort und Energieeffizienz im Fahrgastraum
- Einsatz von Simulationen (Modelica) zur Auslegung und Bewertung von Komponenten und Gesamtsystemen
- Bewertung von Maßnahmen zur Steigerung der Energieeffizienz
- Beitrag zu nachhaltigen Mobilitätskonzepten und zur Erreichung von Klimaschutzzielen im Schienenverkehr
Ansprechpartner: Dipl.-Ing. Alex Swesdarov
Über die konkreten Ausschreibungen hinaus, können Sie uns bei Interesse an Themen in den Bereichen Mehrkörperdynamik, Systemsimulation oder Messwertverarbeitung gerne ansprechen.
Ansprechpartner: Dipl.-Ing. Fabian Wendrock
Schwerpunkt Textilmaschinen

Mögliche Teilaufgaben:
- MKS-Kinematik Vollmodellerstellung Kettenwirkautomat
- NVH Messung/Datenauswertung
- Modellvalidierung gegen NVH
- Fundamentierung Parametrisieren
- Fundamentierung Optimieren
Ansprechpartner: Dipl.-Ing. Jan Schröder
Mögliche Teilaufgaben:
- Simulation des Prüfstands
- Simulationsgestützte Auslegung und Konstruktion
- Fadenzugkraftkompensation
- Simulation und Konzeptionierung in Zusammenarbeit mit ITM
- Ggf. Mitentwicklung der Steuerung
- Steuerungsintegration in SIMPACK
Ansprechpartner: Dipl.-Ing. Jan Schröder
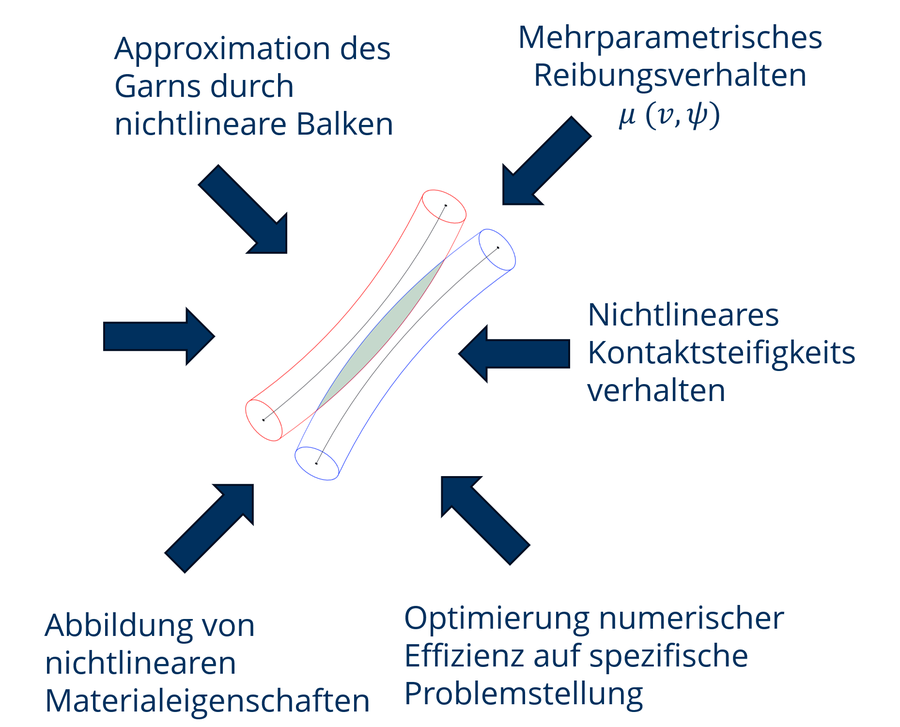
Mögliche Teilaufgaben:
- Recherche/Entwicklung und Implementierung von Suchalgorithmen
- Implementierung mehrparametrischer Reibungsmodelle
- Entwicklung/Optimierung für Hardwarbeschleuniger (CPU, GPU…)
Ansprechpartner: Dipl.-Ing. Jan Schröder
Lehre und Sonstiges
Neben den Angeboten zu unseren aktuellen Forschungsprojekten bieten wir zusätzlich studentische Arbeiten und SHK-Stellen zu Fragestellungen und Aufgaben in der Lehre an. Die Themen sind aufgrund der vielfältigen Fächer sehr breit aufgestellt und bieten eine ideale Möglichkeit, sein Wissen in einzelnen Fächern zu vertiefen.
Falls Sie selbst ein Thema vorschlagen möchten, wenden Sie sich ebenfalls gerne uns.
Externe Angebote
Wir können bei der Vermittlung von Industriepraktika bei unseren Kooperationspartnern behilflich sein. Sprechen Sie uns bei Interesse an.