Theses and Student Assistant jobs
Table of contents
Have you attended one or more of our Chair's courses and gained an insight into our research activities? You can put the knowledge and skills you have acquired to good use right away by working on a current research topic as part of a student project (e.g. assignment, advanced seminar, research project, degree/diploma/bachelor's/master's thesis, etc.) or as a Student Assistant. You can find out more about the focus areas and projects of our Chair here.
Even if no suitable specific topics are advertised, please contact us! If possible, we will try to develop a topic that matches your interests and our core research areas.
If you are interested, please send us an e-mail! We look forward to hearing from you.
Focus on robotics
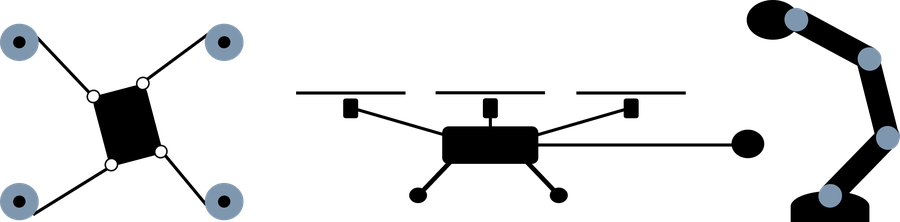
Aerial manipulation describes the use of flying robots (drones) equipped with tools to perform tasks that require contact with the environment. This requires precise positioning of the manipulator and the application of forces and moments to the environment in a targeted manner.
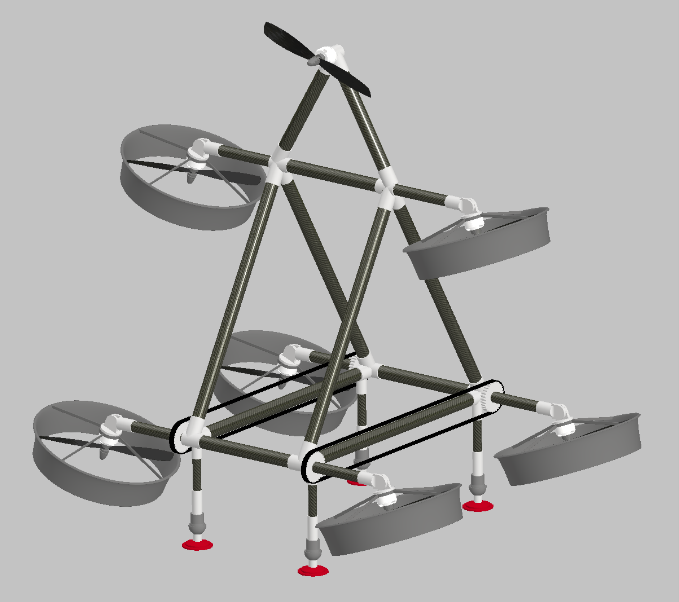
As part of the work, an MBS simulation of a novel fully actuated tilt-rotor drone concept is to be carried out.
Tasks:
- MBS simulation of the drone in Matlab/Simulink
- Simulation of the control system
- Simulation of the contact with the environment
Contact: Dipl.-Ing. Jasmin Werner
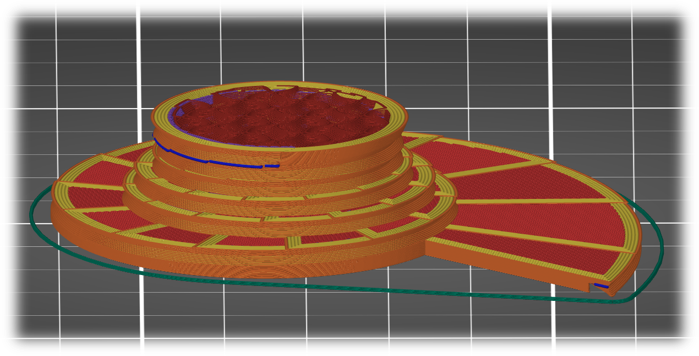
Rope robots are parallel kinematic systems that use flexible cables instead of rigid connecting elements. The cables are usually wound onto drums. Using 3D printing processes, it is possible to manufacture these drums with a variable radius. They allow the transmission ratio to be adjusted along the length of the cable.
Possible tasks for a student thesis are
- Creating the drum geometry from the desired rope path, ideally as software in Python
- CAD design of a winch structure to integrate the drum
- Literature research and experiments on the controlled single-layer winding of ropes
Contact: Dipl.-Ing. Jonas Bieber
Multicopters only fly by actively controlling the thrust of their rotors at all times.
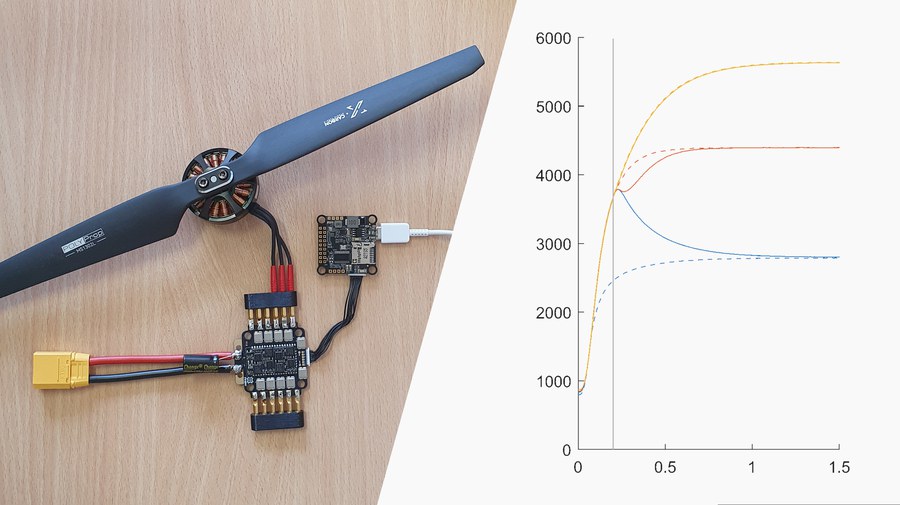
It is often simplistically assumed that the thrust can be adjusted instantaneously. In practice, however, there are inertias in the system that ensure that the required thrust is only achieved with a significant delay. In the future, however, tactile navigation tasks in particular will place higher demands on precession and responsiveness.
The actual time behavior of a UAV drive train (power supply, ESC, motor, propeller) is therefore to be investigated as an essential component of an improved simulation model for designing and testing new controllers.
Tasks:
- Experimental investigation (data acquisition)
- Optimization of ESC parameters for low dynamic control deviation
- Modeling of the system (system identification)
- Physical interpretation
Contact person: Dipl.-Inf. Joram Brenz
In addition to the specific tenders, you are welcome to contact us if you are interested in the following subject areas:
- Regulation and control
- Modeling with Matlab/Simulink
- Robot kinematics
- Software and hardware development
Contact: Dipl.-Ing. David Bernstein
Focus on rail vehicles
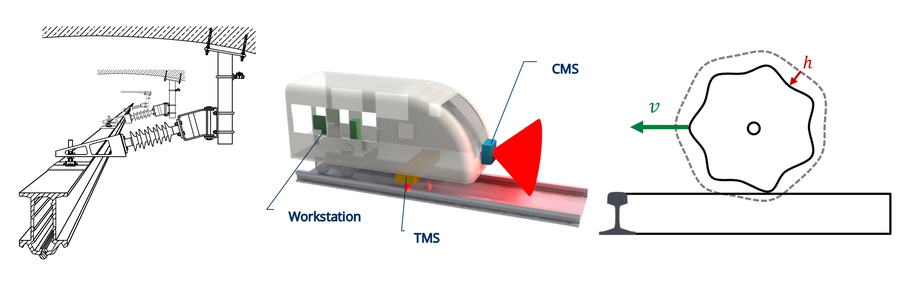
Current core research areas include wheel wear, heat recovery, environment detection and interaction with the overhead contact line. A wide range of topics are possible in these areas, in which you can actively participate as part of a student research project:
As part of the work, measured values from the Leipzig measuring streetcar are to be evaluated. With the aim of automated detection and mapping of singular defects, an overview of the existing welds in the track network and their effect on the vehicles is to be created.
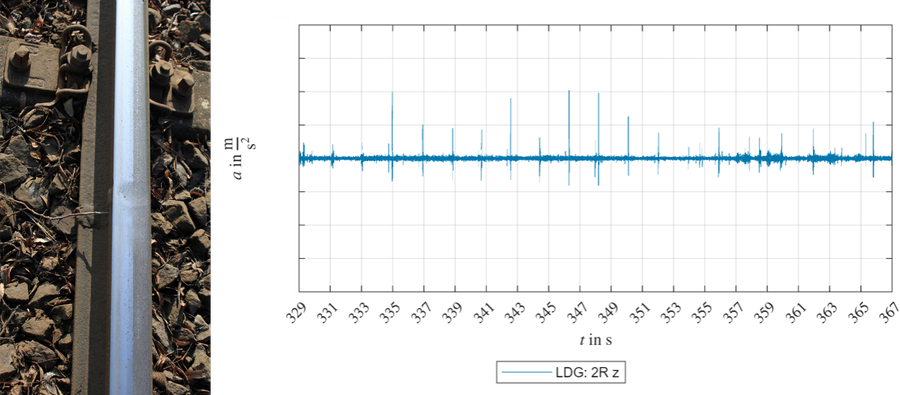
The tasks are
- Literature research for the identification of singular events in large amounts of measurement data
- Implementation of algorithms for the detection of welding joints using vehicle sensors
- Statistical evaluation of the detected defects in the Leipzig route network
- Carrying out parameter studies using MBS simulations (DA)
Contact: Dipl.-Ing. Fabian Wendrock
- Development and optimization of systems for the efficient control and use of energy flows in rail vehicles
- Investigation of methods for recovering and utilizing waste heat, in particular from drive losses and power electronics
- Analysis of thermal requirements for comfort and energy efficiency in the passenger compartment
- Use of simulations (Modelica) for the design and evaluation of components and overall systems
- Evaluation of measures to increase energy efficiency
- Contribution to sustainable mobility concepts and the achievement of climate protection targets in rail transport
Contact: Dipl.-Ing. Alex Swesdarov
Beyond the specific calls for proposals, you are welcome to contact us if you are interested in topics in the areas of multi-body dynamics, system simulation or measured value processing.
Contact: Dipl.-Ing. Fabian Wendrock
Focus on textile machinery

Possible subtasks:
- MKS kinematics Full model creation Automatic warp knitting machine
- NVH measurement/data evaluation
- Model validation against NVH
- Foundation parameterization
- Foundation optimization
Contact person: Dipl.-Ing. Jan Schröder
Possible subtasks:
- Simulation of the test bench
- Simulation-based design and construction
- Thread tension compensation
- Simulation and conceptual design in collaboration with ITM
- If necessary, co-development of the control system
- Control integration in SIMPACK
Contact: Dipl.-Ing. Jan Schröder
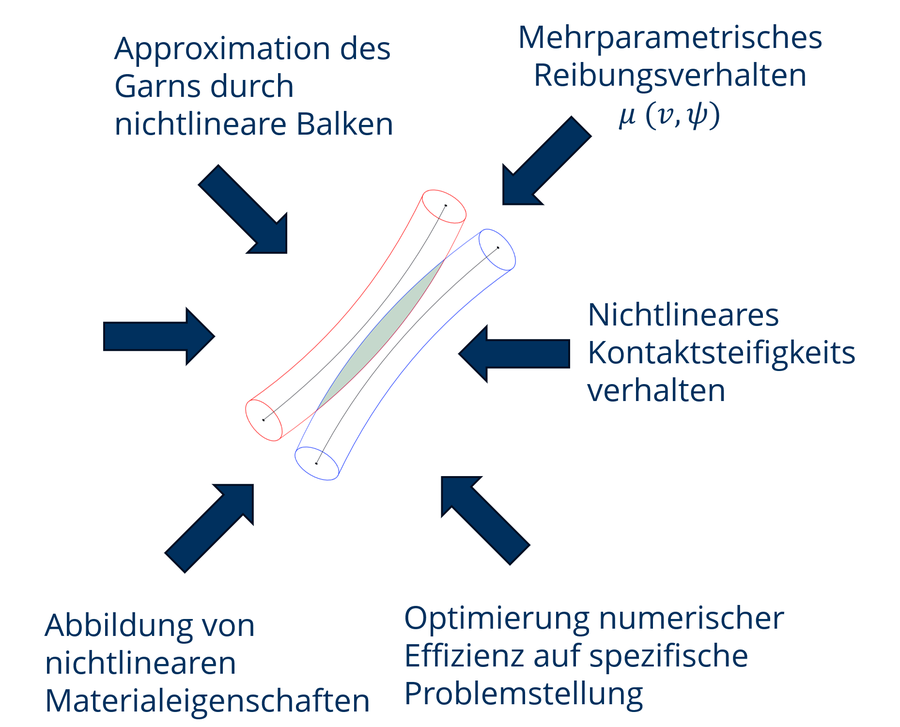
Possible subtasks:
- Research/development and implementation of search algorithms
- Implementation of multi-parametric friction models
- Development/optimization for hardware accelerators (CPU, GPU...)
Contact person: Dipl.-Ing. Jan Schröder
Teaching and other
In addition to our current research projects, we also offer student work and SHK positions on issues and tasks in teaching. The topics are very broadly based due to the wide range of subjects and offer an ideal opportunity to deepen your knowledge in individual subjects.
If you would like to suggest a topic yourself, please contact us.
External offers
We can help arrange industrial internships with our cooperation partners. Please contact us if you are interested.