SFB/TRR 408 - AgiMo: Data-driven agile planning for responsible mobility
The transportation sector has been an unquestioned driving force of societal progress for decades. However, it is now facing unprecedented challenges, e.g., rapid decarbonization, broader demands for equity, and livable cities. Efficiency gains from technological innovation tend to be offset by unintended consequences such as increasing traffic volumes. Integrated planning approaches are key to address these challenges but current research methods in planning are often fragmented, and too focused on motorized transportation and efficiency gains. The opportunities from new data sources are not fully considered, and models are often too technical in their implementation to be suitable for evidence-based participatory planning methods.
The proposed CRC will address the identified research gaps with the following four main research goals:
- Develop a new set of consistent scientific mobility planning methods, including behavioral data and models, and methods for planning and managing transportation systems and mobility services, for all modes from walking to motorized vehicles, while taking advantage of new data sources.
- Integrate a new set of modular metrics for responsible mobility, considering what we call the "4F principles" with the four dimensions Function, Form, Fairness, Forever.
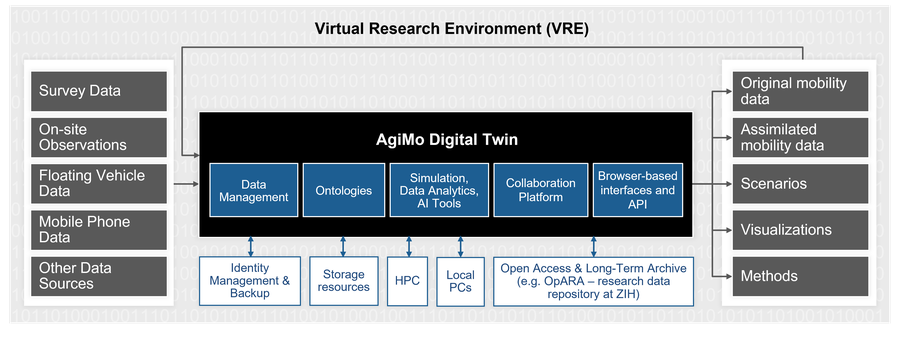
- Embed the new planning methods into the open data AgiMo Digital Twin that provides up-to-date network-wide assimilated mobility data and the models for generating this data with fast turnaround.
- Develop participatory planning methods based on the technical outcomes from the AgiMo Digital Twin to create future scenarios for responsible mobility that are technically well-grounded and at the same time represent stakeholder preferences.
The ZIH as subproject INF is responsible for the virtual research environment, which provides the AgiMo Digital Twin, and integrated high performance computing, data storage, metadata and knowledge management, as well as other aspects of research data management.
Partners
- TU Dresden
- Center for Information Serices and High Performance Computing (ZIH)
- Chair of Mobility System Planning
- Chair of Traffic Process Automation
- Professur für Big Data Analytics in Transportation
- Chair of Econometrics and Statistics, esp. in the Transport Sector
- Chair of Transport Modelling and Simulation
- Chair of Knowledge-aware Artificial Intelligence
- Junior Professorship in Geosensor Systems
- TU München
- Chair of Traffic Engineering and Control
- Chair of Transportation Systems Engineering
- Professorship of Travel Behavior
- Professorship of Economics of Innovation
- Professorship of Business Analytics and Intelligent Systems
- Professorship of Mobility Policy
- TU Berlin, Chair of Transport Systems Planning and Transport Telematics
- German Aerospace Center (DLR), Institute for Transport Research, Transport Markets and Services
- TU Braunschweig, Institute for Sustainable Urbanism
ZIH contact
Duration
10/2025 - 06/2029
Funding
Deutsche Forschungsgemeinschaft (SFB/TRR 408 - 531327426)