Master thesis Robert Jurisch
Abstract
The task of this thesis was the development and verification of a concept for using a smartphone as an active photogrammetric measurement probe. Such active probes can be a more flexible alternative to conventional coordinate measuring machines (CMMs). Based on the existing active photogrammetric probe AICON ProCam, the several necessary steps could be identified and designed. These include the signalisation of reference points, their arrangement in a pattern, the acquisition of object point coordinates by self-calibration, the image measurement of the reference points in the acquired images, the fabrication of a suitable probe tip, the implementation of spatial resection, the development of a method to determine the probe tip position based on the position and orientation of the camera, the development of a calibration method to determine the offset vector between the projection centre of the camera and the probe tip as well as an accuracy test to evaluate the achieved accuracies.
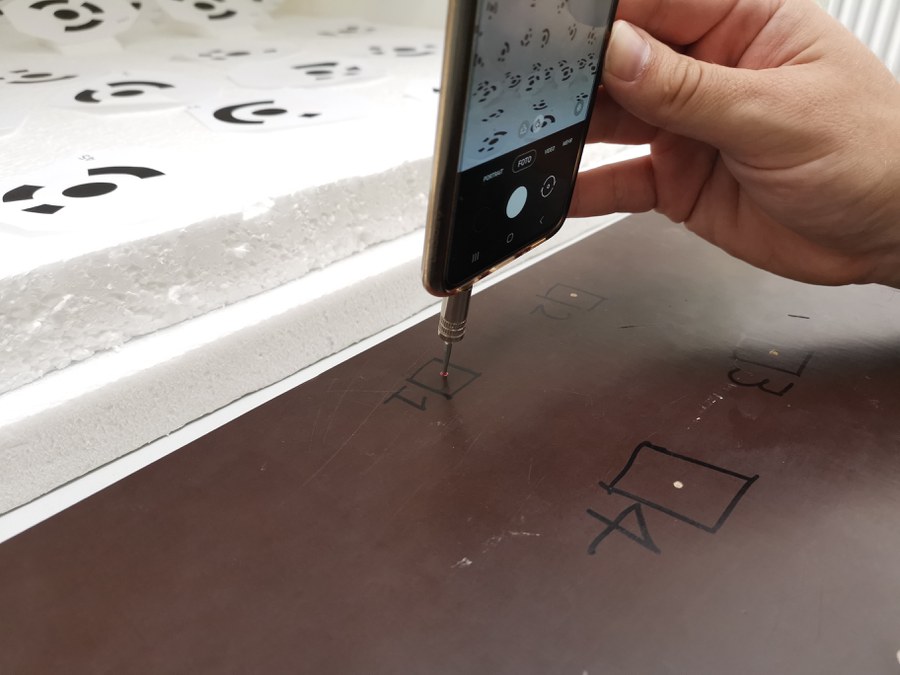
Round measuring marks with a code ring that can represent 14-bit information were used as targets. A calibration cube open to one side for fisheye cameras was used as a reference field because it turned out that a self-built field had too little depth information. The self-calibration was carried out with an SLR camera in the AICON 3D Studio software. A target point detector implemented in C++ was available for the image measurement in the images. The probe tip was made from scratch and attached to the audio port of a Samsung Galaxy A40 smartphone. Since the temporal stability of the camera calibration cannot be assumed to be constant for a smartphone due to thermal influences and the manufacturing quality of the camera modules, the parameters must be re-determined for each pose estimation. The spatial resection is part of the OpenCV software package and has been implemented. In order to get the probe tip position, a solid transformation (6DoF) must be realised. The offset vector to be applied is determined in a calibration procedure in which the probe tip is fixed, several images are taken on the spherical surface described thereby and then the object coordinates of the probe tip can be determined as the centre of a spherical adjustment.
The accomplished tests have shown that the fundamental principle actually works: Position determination and calibration could be carried out successfully. The greatest limitation, however, is the scattering of the individual camera positions by about 3 millimetres. Through appropriate redundancy and selection of the best positions, a standard deviation of 1.6 millimetres could be achieved for the offset vector during calibration. The conducted distance measurements also showed good results: If several images are taken per point and the results are averaged, distances with a deviation of 0.5 to 1.9 millimetres from the reference measurement can be realised.