Masterarbeit Robert Jurisch
Zusammenfassung
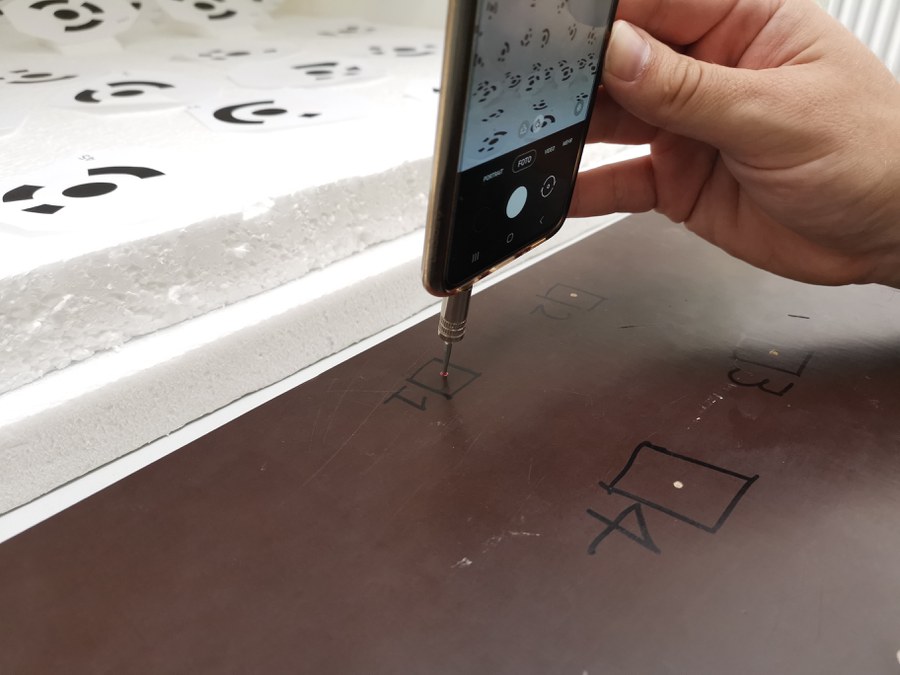
Die Aufgabe dieser Arbeit war die Entwicklung und Verifizierung eines Konzepts zur Verwendung eines Smartphones als aktiver photogrammetrischer Messtaster. Solche aktiven Messtaster können eine flexibel einsetzbare Alternative zu herkömmlichen Koordinatenmessgeräten (KMG) darstellen. Basierend auf dem bereits existierenden aktiven photogrammetrischen Messtaster AICON ProCam konnten die verschiedenen notwendigen Schritte identifiziert und konzipiert werden. Dazu gehören die Signalisierung von Referenzpunkten, deren Anordnung in einem Punktfeld, die Erfassung von Objektpunktkoordinaten durch Selbstkalibrierung, die Bildmessung der Referenzpunkte in den aufgenommenen Einzelbildern, die Anfertigung einer geeigneten Tastspitze, die Implementierung des räumlichen Rückwärtsschnittes, die Entwicklung eines Verfahrens zur Bestimmung der Tastspitzenposition anhand der Position und Orientierung der Kamera, die Entwicklung eines Kalibrierverfahrens zur Bestimmung des Offsetvektors zwischen dem Projektionszentrum der Kamera und der Tastspitze sowie ein Genauigkeitstest zur Bewertung der erreichbaren Genauigkeiten.
Als Ziele wurden runde Messmarken mit einem Code-Ring verwendet, der 14-Bit-Informationen darstellen kann. Ein einseitig offener Kalibrierungswürfel für Fisheye-Kameras wurde als Referenzfeld verwendet, da sich herausstellte, dass ein selbst gebautes Feld zu wenig Tiefeninformationen enthielt. Die Selbstkalibrierung wurde mit einer Spiegelreflexkamera in der AICON 3D Studio Software durchgeführt. Für die Bildmessung stand ein in C++ implementierter Zielmarkendetektor zur Verfügung. Die Tastspitze wurde selbst angefertigt und an den Audioanschluss eines Samsung Galaxy A40 Smartphones angeschlossen. Da die zeitliche Stabilität der Kamerakalibrierung bei einem Smartphone aufgrund von thermischen Einflüssen und der Fertigungsqualität der Kameramodule nicht als konstant angenommen werden kann, müssen die Parameter bei jeder Positionsbestimmung neu bestimmt werden. Der räumliche Rückwärtsschnitt ist Teil des Softwarepakets OpenCV und wurde entsprechend implementiert. Um die Position der Tastspitze zu ermitteln, muss eine feste Transformation (6DoF) durchgeführt werden. Der anzubringende Offsetvektor wird in einem Kalibrierungsverfahren bestimmt, in welchem die Tastspitze fixiert wird, mehrere Bilder auf der damit beschriebenen Kugeloberfläche aufgenommen werden und anschließend die Objektkoordinaten der Tastspitze als Mittelpunkt einer Kugelausgleichung bestimmt werden können.
Die durchgeführten Versuche haben gezeigt, dass das Grundprinzip funktioniert: Positionsbestimmung und Kalibrierung konnten erfolgreich durchgeführt werden. Größte Einschränkung ist dabei jedoch die Streuung der einzelnen Kamerapositionen um etwa 3 Millimeter. Durch entsprechende Redundanz und Selektion der besten Positionen konnte bei der Kalibierung eine Standardabweichung von 1,6 Millimetern für den Offsetvektor erreicht werden. Auch die durchgeführte Streckenmessungen zeigten gute Resultate: Wenn pro Punkt mehrere Aufnahmen durchgeführt und die Ergebnisse gemittelt werden, können Strecken mit 0,5 bis 1,9 Millimetern Abweichung zur Referenzmessung realisiert werden.