Flypulator

Table of contents
Contacting aerial robots
Drones for free flight can already be bought everywhere. But whenever something needs to be repaired or cleaned, specialized aerial robots are needed. Such robots are being developed at TU Dresden. The special advantage of these fully actuated aerial robots with tilted rotors is that they can apply forces in all directions without tilting themselves.
In the image below, a conventional quadrocopter is shown in comparison with the aerial robot "Flypulator" (FLYing maniPULATOR) developed at the TU Dresden. On the right, it can be seen clearly that the rotors are arranged at an angle, while on the left they are all in one plane.

Comparison of a quadrocopter (left) and the „Flypulator“ (right)
In the video, an aerial robot is performing special flight maneuvers and tasks with and without contact to the environment.
| Project | Flypulator |
| Editor | |
| Period | seit 01/2018 |
Description

Aerial robot during manipulation task
Aim of the Flypulator project is the development of flight robots for manipulation of stationary objects. Possible application scenarios include cleaning tasks and vegetation trimming in hardly accessible places. The development is focused on fully actuated flight robots. Due to their high agility, they allow the use of lightweight manipulators with small degree of freedom. The most important fields of activity are the construction of the hardware, the development and implementation of the control system and a detailed modelling including aerodynamical simulations and experiments.
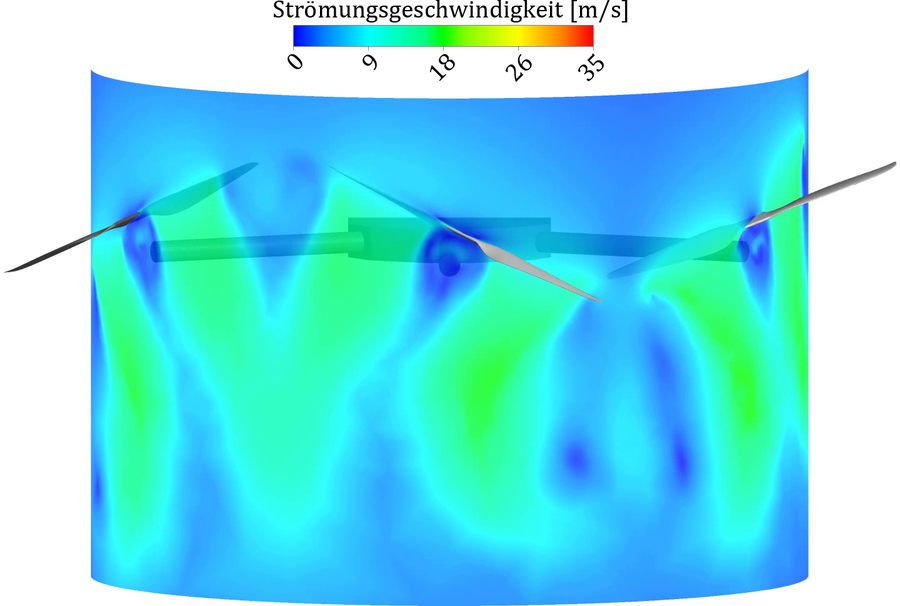
Flow velocities of interfering rotors at fully actuated flight.
Regarding student research projects, tasks arise in the following areas:
- Control engineering
- Constructive tasks
- Computer vision
- Numerical flow simulation
- Measurement experiments
- Commissioning of the robot