ReHoAkt II
Table of contents
Important data at a glance
| Project titel: | ReHoAkt II – Controlled FG high-load actuator for automated fine adjustment of machine components and large parts |
|---|---|
| Duration: | 11/2020 – 12/2021 |
| Collaborative project: | yes |
| Subproject title: | Development and experimental functional verification of an automation solution for the alignment of profile rails by means of FG high-load actuators |
| Funding: | PTJ, BMBF zwanzig20 |
| Funding code: | 03ZZ1040A |
| Processor / Contact person: | Dipl.-Ing. Ludwig Rogall Dipl.-Ing. Christoph Peukert |
| Cooperation: | Fraunhofer IWU Feinmechanisches Fertigungszentrum Glashütte GmbH FFZ Dr. Matzat & Co. GmbH A.S.T. – Angewandte System Technik GmbH, Mess- und Regeltechnik watttron GmbH |
| Logline: | Development and testing of concepts for the fine adjustment of large components and machine components by means of the FG actuators as well as development, design, construction and experimental functional verification of an automation solution for the alignment of profile rails by means of FG high load actuators. |

Objective
Motivation
Both during assembly and commissioning as well as for the operation of machine tools, there are very high requirements with regard to the measurement and alignment or positioning of assemblies, such as guides, spindles, bearings and drives. The machining of large workpieces also requires time-intensive alignment processes. Particularly in the case of very precise and high-quality large components, more time is sometimes required for alignment than for machining the workpiece itself [1]. In the fine alignment of machine components and large parts, there is also a great dependence on the expertise and skills of the personnel. Thus, the fine alignment of machine components during initial commissioning, retrofitting or repair of machines, as well as the fine alignment of large workpieces, results in a high value-added share.
Solution approach
The aim of the project is to automate and thus significantly shorten alignment processes of workpieces and machine components with shape memory actuators. In order to allow a time- and cost-efficient as well as operator-independent alignment of machine components and large parts, controllable high-load actuators based on shape memory alloys (FGL) are to be developed and experimentally investigated (basic technology development). In the predecessor project ReHoAkt I, the focus was on material investigation and stabilization, the creation of extensive simulation models of the actuators and the applications, and the development, design and manufacture of controlled actuators. In addition, a concept for stress measurement in PSF had to be developed.
In ReHoAkt II, further experiments will be carried out to further validate the simulation models created in Phase I and to optimize the selected actuation and control strategies. The structure-integrated force measurement technique for strain-free PSF fine adjustment will be optimized, implemented and experimentally characterized. Based on the virtual process investigations of the planned applications in ReHoAkt I – the alignment of profile rail guides and the alignment of large workpieces – corresponding demonstrators are also to be designed, built and investigated. Finally, the developed FGL high-load actuator technology and the developed alignment procedures are to be evaluated.
Challenges
The phase transformation temperatures of the FG material show a strong dependence on the alloy composition. This varies both between different and within one batch of the semi-finished product. In addition, incomplete microstructural transformations cause shifts in the transformation temperatures.
Within the project, approaches are to be developed to take these parameter changes into account in the model-based control in order to further improve the control accuracy.
The signals of the structure-integrated force measurement are determined not only by the existing position errors of the profile rail guides of the feed axis, but also by external loads and the geometry and connection of the slide. Distinguishing the causes with as little measurement effort as possible is a challenge. However, it is necessary in order to calculate correct control signals for the actuators.
In the previous project, several process variants for the alignment of profile rail guides were developed. The demonstrator to be set up is intended to enable testing of as many of the developed methods as possible. The different methods – geometric and low-stress alignment – place different demands on the design of the test rig. In addition, the processes are to be investigated on several sizes and the use of materials kept to a minimum. Overall, the requirements lead to an increased design effort.
Solution
To estimate the influences of varying material parameters, sensitivity studies are first carried out. For critical parameters that fluctuate due to manufacturing, procedures for identification are then created. These can be carried out once during commissioning of the assembled actuator. For parameters that change as a result of actuator operation, suitable means of control engineering must be found, tested and finally implemented.
To extend the sensitivity of the force measurement technology, simulation-based investigations of the deformation behavior of the assembly are first carried out. In doing so, the occurring strains at metrologically accessible locations of the carriage as a result of positional errors are analyzed. The most suitable combination of measurement locations is then determined using principal component analysis. Simulation-based investigations are also carried out to identify suitable calibration procedures. For experimental verification of the developed approaches, an experimental fixture is set up. By means of this device, the calibration procedure is first performed. Then, the calibration result is validated by manipulating the rail spacing.

Fig. 1: Assembled alignment module – variant A
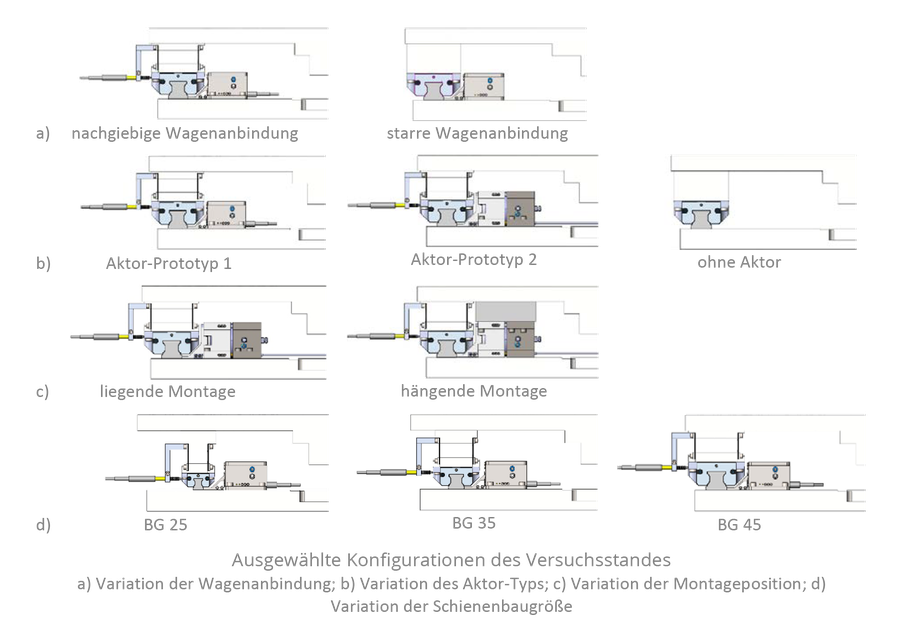
To test the alignment procedure, a feed unit will be designed, manufactured, assembled and put into operation. Its operation also requires the creation of a control system. The actuating signals of the low-stress alignment system are calculated from the sensor data of the force measurement system. For this purpose, its data acquisition module must be integrated into the control system. The actuating motion during rail alignment is to be performed with alignment modules that were designed in the previous project. In ReHoAkt II, these alignment modules will be manufactured, assembled and commissioned. Establishing communication between the controller and the various sensors and actuators is a key focus. These include the heating elements, the pneumatic valve and various displacement sensors to be tested. Before the alignment modules are used in the testing of the processes, their experimental investigation is planned in order to identify weak points in the mechanics or the achievable control accuracy and to remedy them if necessary. Finally, the methods created in ReHoAkt I are to be tested experimentally on the test rig on the three profile rail sizes provided. The alignment results are to be evaluated with regard to geometric accuracy and permanent internal stresses, as well as effort and duration, and compared with the state of the art. In addition, the influences of possible disturbance variables, such as temperature, scattering pre-assembly torques, varying states of the assembly surfaces are to be analyzed. In order to evaluate the potential of low-stress alignment, the motor currents are also to be recorded and evaluated in each case before and after geometric and low-stress alignment.

Fig. 2: CAD model of the test rig for testing the methods for aligning the profile rails of a feed axis.
For the second application of controllable FG high-load actuators - the alignment of large workpieces - a project partner is developing, constructing and assembling a test rig with dummy workpiece and specially adapted FGL high-load actuator demonstrators. For this test setup, the LWM develops a control concept for the actuator demonstrators. This includes the creation of a measurement concept for recording the workpiece position, the development of algorithms for data evaluation and calculation of the required actuator travel to correct the workpiece position. The control concept created is then implemented in the control system of the trainer. Finally, the measurement and control concept of the actuators is to be investigated and evaluated experimentally on the trainer set up.
Notes
As a result of the impact of the Corona pandemic, both the LWM and the project partners experienced notable delays in processing the project. Among other things, reduced workshop operations as a measure of the containment measures caused the speed of production of numerous parts for the assembly of the demonstrator test stand. Due to persistent supply bottlenecks of electronic components, the alignment modules could only be built with delay and with alternative components. This resulted in an increased effort to implement the communication functions into the control system.
For this reason, the duration of the project was extended by four months to April 2022.
Sources
[1] Bimatec, S. : Vollintegriertes 3D-Vermessungssystem. In: MAV: Innovation in der spanenden Fertigung (2015), Nr. 6, S. 112
Contact
 © Crispin-Iven Mokry
© Crispin-Iven Mokry
Research associate
NameMr Dipl.-Ing. Ludwig Leser
Control and Feedback Control Systems
Send encrypted email via the SecureMail portal (for TUD external users only).
Chair of Machine Tools Development and Adaptive Controls
Visiting address:
Kutzbach-Bau, Room 203 Helmholtzstraße 7a
01069 Dresden