Bachelorarbeit Oliver Grothum
Titel der Arbeit:
Untersuchung der Eignung eines Fixed Wing UAV zur Lokalisierung von Blaualgen
Betreuer:
Dipl.-Ing. Katharina Pech, Dipl.-Ing. Nadine Stelling
Beschreibung:
Ziel des zu Grunde liegenden Projektes ist die Bekämpfung von Cyanobakterien (Blaualgen) mittels Aluminiumsulfat. Bis dato müssen zur Lokalisierung Untersuchungen des Wassers im Labor auf diese Bakterien durchgeführt werden. Daher soll untersucht werden, wie gut geeignet eine Einzelbildauswertung (bzw. das Monoplotting auf ebener Fläche) eines Bildverbandes, welches via Fixed Wing UAV (Umanned Aerial Vehicle) (Abbildung 1) und mittels direkter Georeferenzierung aufgenommen wurde, für dieses Problem ist. Die direkte Georeferenzierung hierbei ist die Positionierung und Orientierung eines Bildes mittels direkter Sensororientierung, d.h. mittels GNSS-Positionierung und Orientierung mit einem Inertialmessystem (IMS oder auch als Hardwarebegriff: IMU).

Abbildung 1: Eingesetztes UAV
In einer ersten Vorbetrachtung werden zunächst UAV-Systeme definiert sowie Vor- und Nachteile herausgearbeitet. Für die Einzelbildauswertung werden die dazu nötigen Koordinatensysteme aufgelistet und beschrieben. Anschließend erfolgt die Herleitung des Bezuges zwischen Bildpunkt im Messbild und Objektpunkt im Objektsystem zur sogenannten Kollinearitätsgleichung. Dabei werden die nötigen Begriffe der inneren Orientierung (Bildhauptpunktkoordinaten xH, yH und Kamerakonstante c) und der äußeren Orientierung (Koordinaten des Projektionszentrums im Objektkoordinatensystem X0, Y0, Z0 sowie die drei Bildneigungswinkel ω, φ, κ) eingeführt. Im Anschluss erfolgte eine Übersicht zur Transformationsabfolge, welche die Neigungs- und Kurswinkel der UAV (θ, Φ, Ψ) in die Bildneigungswinkel der äußeren Orientierung überführt.
Um eine Genauigkeitsaussage über die errechneten Objektpunktkoordinaten machen zu können, wurde ein Testfeld terrestrisch vermessen und parallel dazu überflogen. Dies wurde für zwei Testgebiete durchgeführt (Bauda und Johanngeorgenstadt). Die Passpunkte wurden im Anschluss im Bildmaterial gemessen (Abbildung 2). Mithilfe eines erstellten Berechnungsablaufes in MATLAB wurden die einzelnen Objektkoordinaten berechnet. Um im Voraus abzuschätzen, wie sich einzelne Abweichungen in den Parametern der Kollinearitätsgleichung auswirken, wurde an einem Zahlenbeispiel der Einfluss dieser Abweichungen aufgezeigt. So zeigte sich, dass bei flach eintreffenden Abbildungsstrahlen kleine Fehler in der Objekthöhe, in der äußeren Orientierung und in der inneren Orientierung große Abweichungen in der Lage auslösen. Die Größe dieser Abweichung ist ebenfalls von der Flughöhe abhängig (Auf 1000 m Flughöhe kann 1° Abweichung in der Bildneigung zu ca. 17m Lageabweichung führen)

Abbildung 2: Beispiel Bildaufnahme. Sichtbarkeit eines Pssspunktes
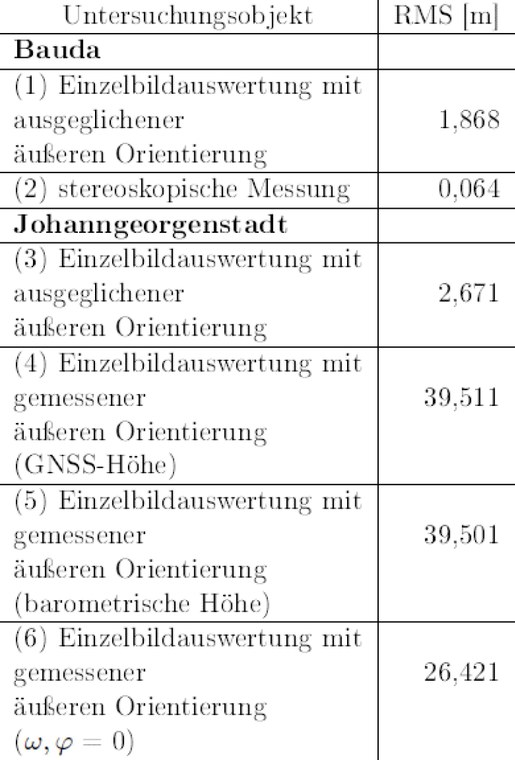
Abbildung 3: Untersuchungsergebnis
Eine Übersicht über das Ergebnis liefert hierbei die Tabelle (Abbildung 3). Es lassen sich folgende wesentliche Ergebnisse schlussfolgern:
- Das Ergebnis der stereoskopischen Auswertung ist wesentlich genauer als das der Einzelbildauswertung
- Die Genauigkeitsanforderung von 10m konnten nicht erreicht werden. Die Standardabweichung (bezeichnet als RMS) beträgt ca. 40m
- Die barometrische Höhenmessung lieferte keine deutliche Verbesserung des Ergebnisses
Ebenfalls auffällig ist die Streuung die berechneten Objektpunkte bei den beiden nordöstlichen Kontrollpunkte im Gebiet Johanngeorgenstadt. Diese Streuung geschieht um einem anderen Mittelpunkt als um den Kontrollpunkt selber. Dies weist insbesonders auf systematische Abweichungen in den bestimmten Bildneigungswinkel hin. (Abbildung 4)
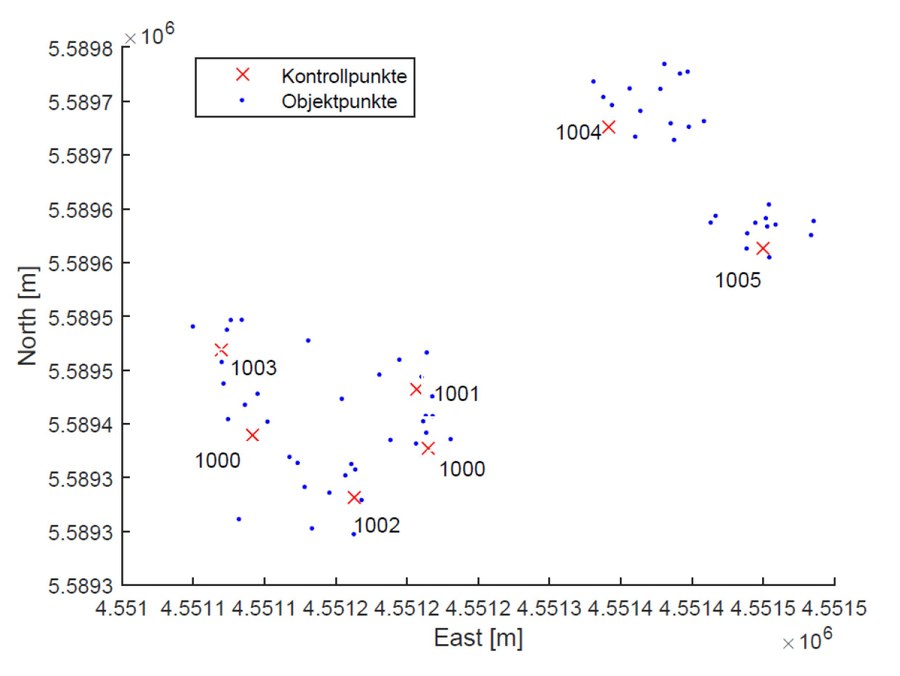
Abbildung 4: Lösung der Objektkoordinatenbestimmung mit der gemessenen äußeren Orientierung
Somit ist mit derzeitigen Einsatz und Mitteln die Positionierung auf 10 m genau nicht möglich. Die Lageabweichung von 40 m resultieren in einer Überlagerung der Höhen- und insbesondere der Bildneigungsabweichungen, da ein besseres Ergebnis erzielt werden konnte, wenn die Winkel ω und φ auf 0 gesetzt wurden. Um nun die Genauigkeit zu steigen, ist es nötig, mit differentiellen GNSS-Lösungen zu arbeiten, um insbesondere die Höhe des Projektionszentrums zu bestimmen. Zudem muss das Drift-Verhalten der IMU eingeschränkt werden. Dies ist mit Kombination des GNSS-Moduls zu einem Positionierungs- und Orientierungssystem möglich. Zudem sollte eine Kalibrierung des Systems bezüglich des Offset-Vektors zwischen GNSS-Antenne und des Misalignments zwischen Bildkoordinatensystem und INS-System, welches durch den schief-achsigen Einbau der Kamera entsteht. Hierbei ist zu beachten, dass trotz einmaliger Kalibrierung Abweichungen entstehen können, wenn die Kamera nicht starr eingebaut werden kann oder die Kamera sich bezüglich der inneren Orientierung verändert.