Bewegungstechnik
Motivation
In Verarbeitungsmaschinen werden vielfältigste bewegte Arbeitsorgane zur Realisierung eines Verarbeitungsvorganges eingesetzt. Hierbei müssen meist schnelle ungleichmäßige Bewegungen, wie z.B. beim Zuführen von Produkten, realisiert werden, die den Anforderungen der ausgeführten Prozesse genügen. Häufig kommen speziell entwickelte nichtlinear übersetzende Getriebe zum Einsatz, aber auch moderne robotische Systeme.
Spielen bei der Mehrheit der Entwicklungen Kriterien wie z.B. die Modularität oder geringe Herstellkosten eine wichtige Rolle, so treten Grenzen genau dann auf, wenn sehr schnelle bzw. anspruchsvolle Bewegungen gefordert sind oder das Produkt ein Eigenverhalten aufweist, welches nur schwer beherrscht werden kann.
Ansatz
Durch Berücksichtigung des Eigenverhaltens einer Wirkpaarung in der konkreten Gestaltung der Prozessführung kann eine deutliche Verbesserung der Zuverlässigkeit sowie der minimal erreichbaren Zykluszeiten von Verarbeitungsvorgängen erreicht werden. Grundlage bildet ein valides Prozessmodell, welches die relevanten Wirkzusammenhänge abbildet.
Schwerpunkte
Die Arbeiten umfassen die Entwicklung und Anwendung von Methoden zur Leistungserhöhung der Verarbeitungsprozesse mit bewegten Arbeitsorganen oder bewegten Verarbeitungsgütern. Im Speziellen wird sich auf die beiden Verarbeitungsvorgänge „intermittierender Fluidtransport in einem Behälter“ und „Stückguttransport mit Vakuumgreifern“ beschränkt.
Intermittierender Fluidtransport in einem Behälter
Der intermittierende Fluidtransport findet häufig in Verpackungsanlagen der Getränke- und Pharmaindustrie statt. Auf eine Bewegungsphase folgt eine Rastphase, in welcher weitere Verarbeitungsvorgänge, etwa zur Qualitätssicherung oder Etikettierung stattfinden können.
Prozessbedingt ist es einerseits nötig, dass in der Rastphase keine Schwingung des Fluides vorliegt, andererseits darf während der Bewegungsphase kein Fluidverlust stattfinden. Hierfür werden optimale Bewegungsdesigns berechnet, welche die genannten technologischen Anforderungen erfüllen und erhebliche Vorteile bezüglich maximal erreichbarer Zyklusraten gegenüber konventionellen Bewegungsdesigns bieten. Untersuchungen zur robusten und adaptiven Gestaltung des Prozesses sind Gegenstand aktueller Forschungsvorhaben.
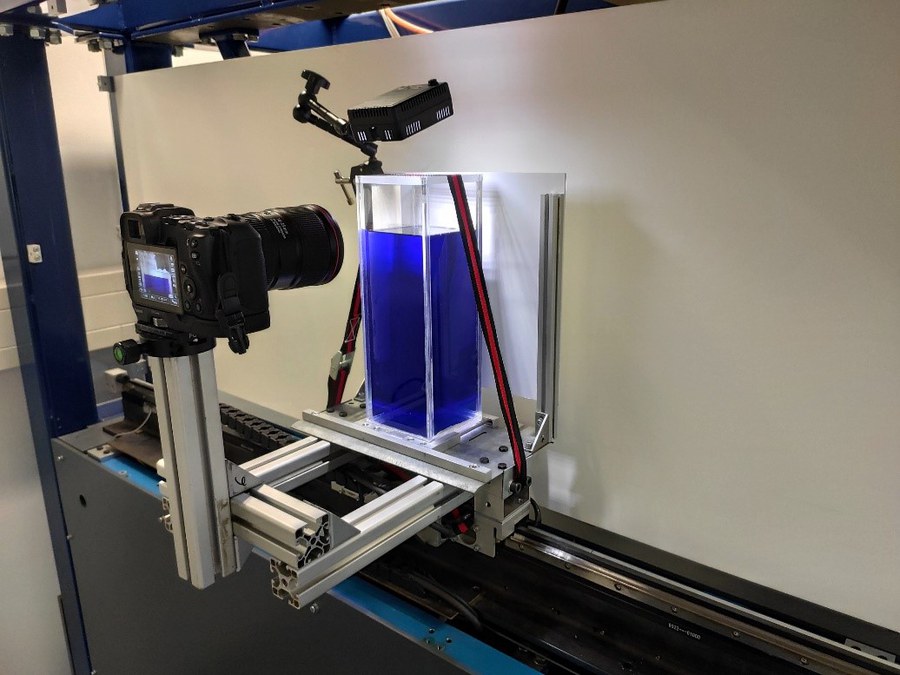
Versuchsstand zur Untersuchung des intermittierenden Fluidtransports
Stückguttransport mit Vakuumgreifern
Einlegeprozesse in Verpackungsmaschinen werden zunehmend von Systemen mit freier Bewegungsfunktion, z.B. Robotern mit parallelkinematischer Struktur realisiert. Deren Anpassungsfähigkeit stellt dabei einen großen Vorteil dar. Der Einsatz von elastischen Vakuumgreifern erlaubt darüber hinaus eine hohe Flexibilität bezüglich der Oberflächeneigenschaften und Geometrie der Produkte. Ziel ist es, durch eine Anpassung der Prozessführung eine Reduktion der Belastung der Wirkpaarung, bestehend aus Vakuumsauger und Produkt, zu erreichen. Hierfür werden, abhängig von der vorliegenden Greiferausführung verschiede Prozessmodelle verwendet und in die Bewegungsplanung einbezogen. Ebenso wird eine Erweiterung der im Stand von Wissenschaft und Technik etablierten, stark vereinfachten Prozessmodelle angestrebt.
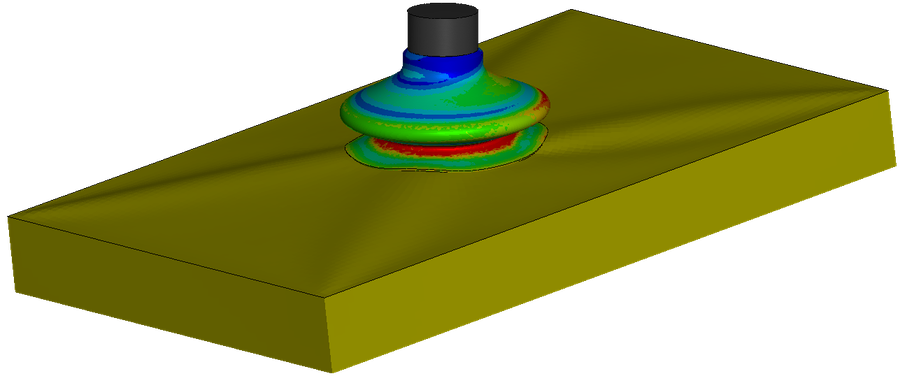
FEM Modell zur Abbildung des Verhaltens einer Wirkpaarung aus einem elastischen Sauggreifer und einer Verpackung mit elastischer Oberfläche
Technische Ausstattung
Für die Forschungsschwerpunkte existieren am Lehrstuhl Versuchsstände, welche mit entsprechender Messtechnik ausgestattet sind. Neben Kraft- und Beschleunigungsmessungen sowie der Analyse steuerungsinterner Signale werden vorrangig optische Messsysteme verwendet und problemspezifisch ausgewertet (Photogrammetrie).
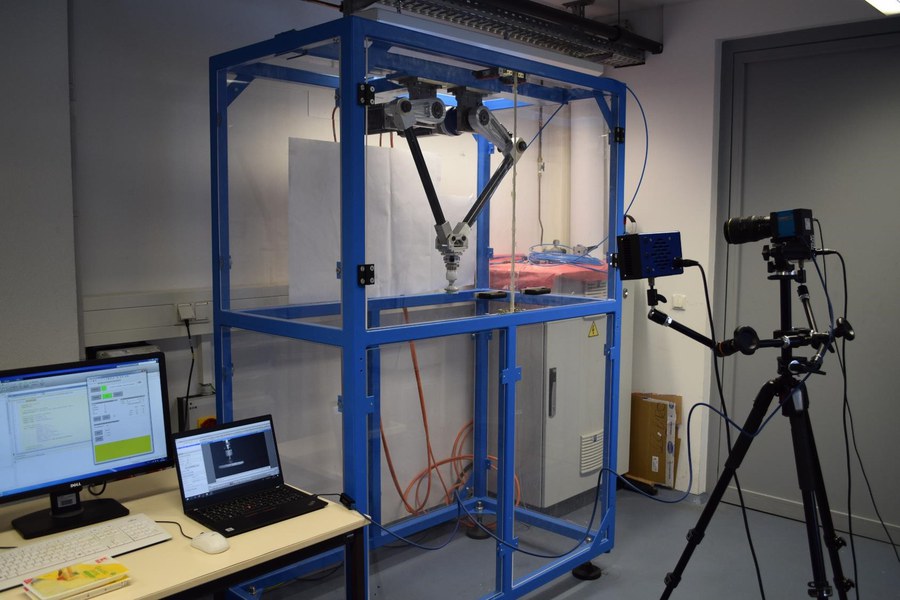
Deltaroboter mit optischem Messsystem
Hier finden Sie eine Übersicht über unsere aktuellen Forschungsprojekte.
Kontakt
 © Clemens Troll
© Clemens Troll
Verarbeitungssysteme
NameDipl.-Ing. Georg Steinert
Arbeitsgebiet Bewegungstechnik
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).