Subproject 3: Materials and process design of elastomers with material-integrated locally adjustable sensoric and adaptive properties
Motivation
Function-integrated elastomers with adaptive mechanical properties have the potential to ensure the desired „on-demand“ deformation characteristics of composites by locally variable material stiffness and to serve as a material-intrinsic diagnosis system (sensoric functionality) to monitor and control the deformation state of the I-FRC.
State of the art and preliminary research
Extensive preliminary research and the state of the art in the fields of dispersion, process-integrated distribution monitoring, stabilization of carbon allotropes in diene rubber, structural developments of filler flocculation, and sensor properties will form the foundation for this project.
Scientific questions and project objectives
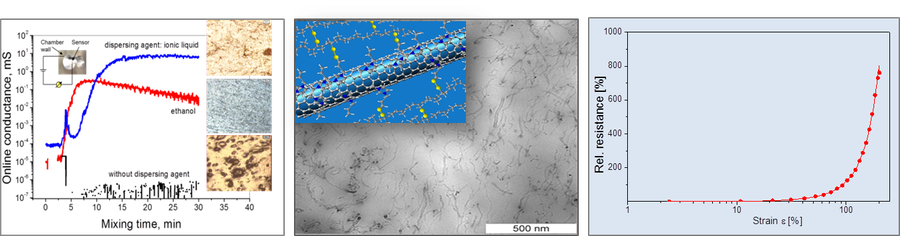
The target of TP3 is the research and development of tailored graded elastomeric materials that are equipped with sensoric and adaptive properties and their integration into complex I-FRC with a special focus on the interface design in the elastomer-particle-system. To achieve the desired characteristics, the piezo-resistive sensoric properties of percolated particle networks based on carbon allotropes shall be combined on the material level with the mechanical adaptivity (deformation & stiffness) induced by controlled orientation of magnetic particles in a cross-linked elastomer matrix. Suitable processes for the local integration of functional particle systems into composites have to be developed and technologically implemented in such a way that the microstructural state of dispersion of the functional fillers and their interaction with the elastomer can be controlled by appropriate design of the particle-matrix-interface.
By a defined assembly of zones locally enriched with magnetic particles and piezoresistive sensoric domains, it should be possible to spatially record the state of deformation of the I-FRC. Due to the anticipated limited extent of the MSE effect (magnetic flux density, weight of the magnets), especially at large deformations, the implementation of the adaptive magneto-induced stiffening of the I-FRC will be realized locally by cellular structures, which act as locally switchable adaptive elements. Thus, large global deformations of the I-FRC structure can be achieved without sacrificing the MSE effect in the elastomer substructures themselves. To tailor the local stiffness by means of a variable cross-link density, the elastomer precursors could be crosslinked for example by electron irradiation with varied electron energy and/or exposure time to achieve three-dimensional graded properties in the I-FRC.
Contact
Institute of Materials Science (IfWW), Professorship for Rubber Materials, Faculty of Mechanical Science and Engineering at TU Dresden
Leibniz Institute for Polymer Research Dresden e.V. (IPF)
 © Christian Hüller
© Christian Hüller
Mr Prof. Dr.-Ing. Sven Wießner
Head of Research Division "Elastomers"
Besucheranschrift:
Leibniz-Institut für Polymerforschung Dresden e.V., Leibniz-Institut für Polymerforschung Dresden e.V. Hohe Straße 6
01069 Dresden
Deutschland